from compas.geometry import Point, Vector, Plane
from compas.geometry import Sphere, Cylinder, Box
from compas.geometry import Translation
from compas_view2.app import App
from compas_gmsh.models import CSGModel
# ==============================================================================
# Geometry
# ==============================================================================
R = 1.4
P = Point(0, 0, 0)
X = Vector(1, 0, 0)
Y = Vector(0, 1, 0)
Z = Vector(0, 0, 1)
YZ = Plane(P, X)
ZX = Plane(P, Y)
XY = Plane(P, Z)
box = Box.from_width_height_depth(2 * R, 2 * R, 2 * R)
sphere = Sphere(P, 1.25 * R)
cylx = Cylinder((YZ, 0.7 * R), 3 * R)
cyly = Cylinder((ZX, 0.7 * R), 3 * R)
cylz = Cylinder((XY, 0.7 * R), 3 * R)
# ==============================================================================
# CSG Model
# ==============================================================================
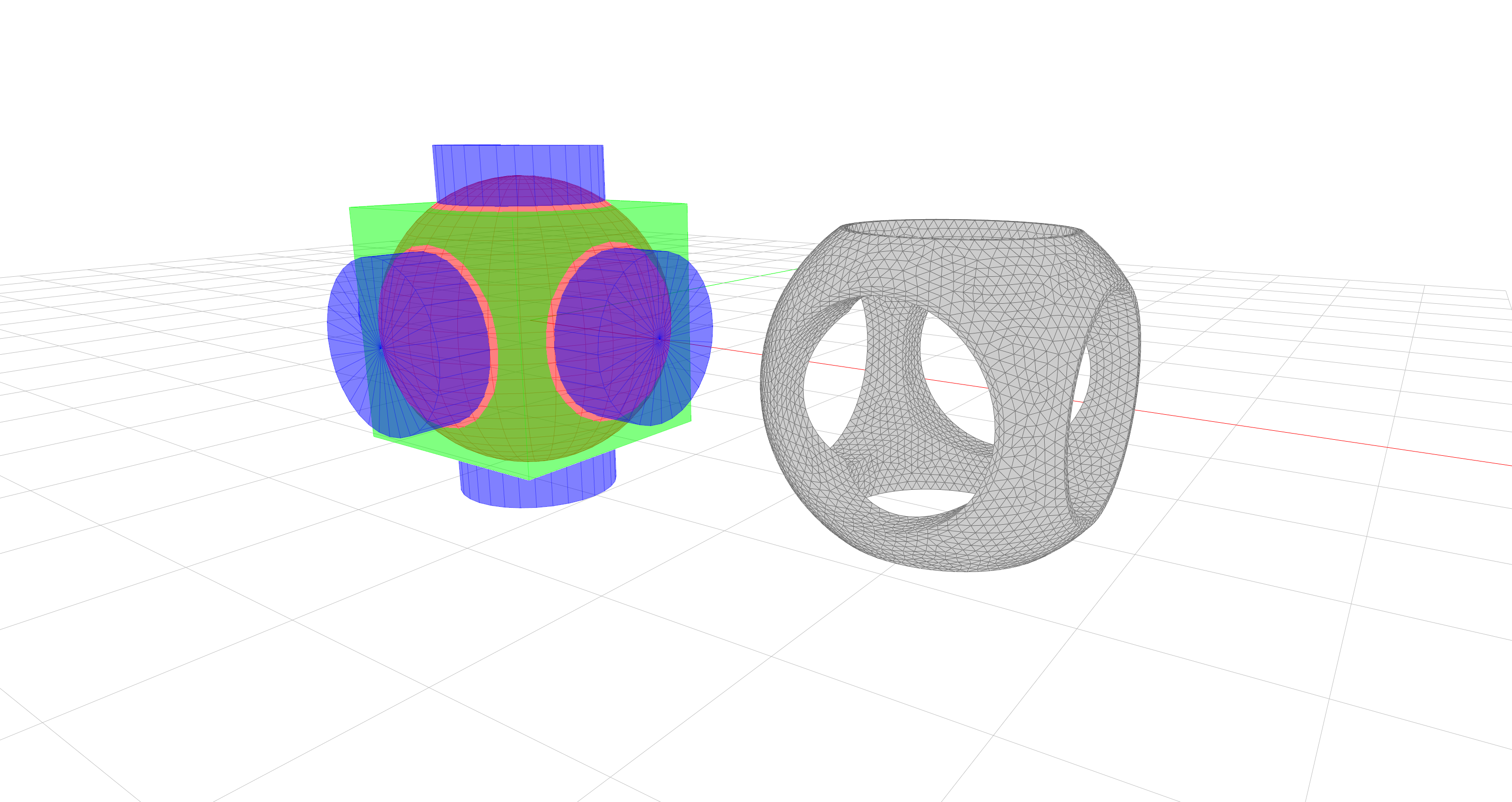
tree = {
'difference': [
{'intersection': [sphere, box]},
{'union': [cylx, cyly, cylz]}
]
}
model = CSGModel(tree, name="csg")
model.lmin = 0.2
model.lmax = 0.2
model.compute_tree()
model.generate_mesh()
model.refine_mesh()
model.optimize_mesh()
# ==============================================================================
# COMPAS mesh
# ==============================================================================
mesh = model.mesh_to_compas()
mesh.transform(Translation.from_vector([4 * R, 0, 0]))
# ==============================================================================
# Visualization with viewer
# ==============================================================================
viewer = App(width=1600, height=900)
viewer.view.camera.rz = -35
viewer.view.camera.rx = -75
viewer.view.camera.tx = -2 * R
viewer.view.camera.ty = 1
viewer.view.camera.distance = 12
viewer.add(sphere, u=32, v=32, opacity=0.5, color=(1, 0, 0))
viewer.add(box, opacity=0.5, color=(0, 1, 0))
viewer.add(cylx, u=32, opacity=0.5, color=(0, 0, 1))
viewer.add(cyly, u=32, opacity=0.5, color=(0, 0, 1))
viewer.add(cylz, u=32, opacity=0.5, color=(0, 0, 1))
viewer.add(mesh)
viewer.run()