Mapping
from compas.colors import Color
from compas.datastructures import Mesh
from compas_viewer import Viewer
from compas_viewer.config import Config
from tessagon.adaptors.list_adaptor import ListAdaptor
from tessagon.types.brick_tessagon import BrickTessagon
from tessagon.types.dissected_hex_quad_tessagon import DissectedHexQuadTessagon
from tessagon.types.dissected_hex_tri_tessagon import DissectedHexTriTessagon
from tessagon.types.dissected_square_tessagon import DissectedSquareTessagon
from tessagon.types.dissected_triangle_tessagon import DissectedTriangleTessagon
from tessagon.types.dodeca_tessagon import DodecaTessagon
from tessagon.types.floret_tessagon import FloretTessagon
from tessagon.types.hex_big_tri_tessagon import HexBigTriTessagon
from tessagon.types.hex_tessagon import HexTessagon
from tessagon.types.hex_tri_tessagon import HexTriTessagon
from tessagon.types.octo_tessagon import OctoTessagon
from tessagon.types.pythagorean_tessagon import PythagoreanTessagon
from tessagon.types.rhombus_tessagon import RhombusTessagon
from tessagon.types.square_tessagon import SquareTessagon
from tessagon.types.square_tri_tessagon import SquareTriTessagon
from tessagon.types.tri_tessagon import TriTessagon
from tessagon.types.weave_tessagon import WeaveTessagon
from tessagon.types.zig_zag_tessagon import ZigZagTessagon
import compas_libigl as igl
TESSAGON_TYPES = {
1: ("Hex", HexTessagon),
2: ("Tri", TriTessagon),
3: ("Octo", OctoTessagon),
4: ("Square", SquareTessagon),
5: ("Rhombus", RhombusTessagon),
6: ("HexTri", HexTriTessagon),
7: ("DissectedSquare", DissectedSquareTessagon),
8: ("DissectedTriangle", DissectedTriangleTessagon),
9: ("DissectedHexQuad", DissectedHexQuadTessagon),
10: ("DissectedHexTri", DissectedHexTriTessagon),
11: ("Floret", FloretTessagon),
12: ("Pythagorean", PythagoreanTessagon),
13: ("Brick", BrickTessagon),
14: ("Weave", WeaveTessagon),
15: ("ZigZag", ZigZagTessagon),
16: ("HexBigTri", HexBigTriTessagon),
17: ("Dodeca", DodecaTessagon),
18: ("SquareTri", SquareTriTessagon),
}
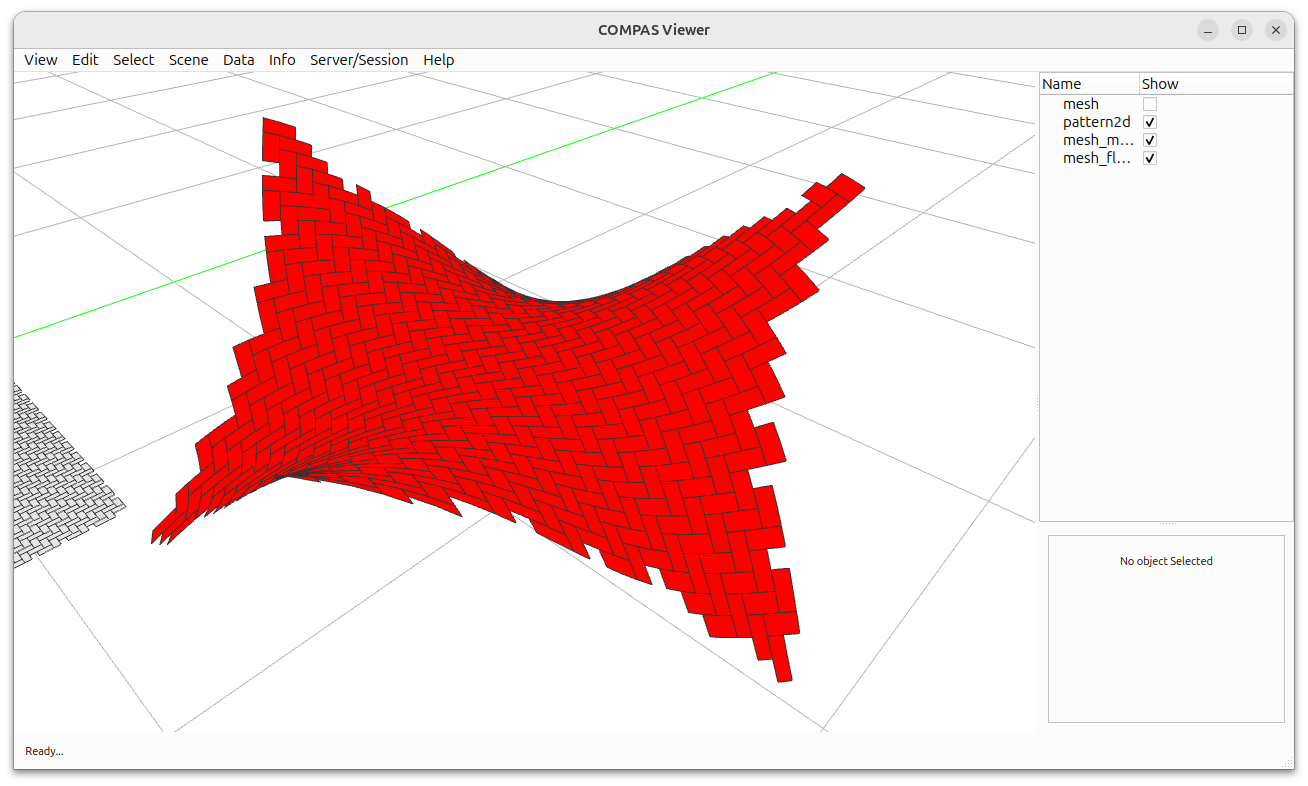
# Pattern selection - change this value to use a different pattern
PATTERN_TYPE = 15
# ==============================================================================
# Input geometry: 3D Mesh
# ==============================================================================
mesh = Mesh.from_obj("data/minimal_surface.obj")
for key, attr in mesh.vertices(True):
y = attr["y"]
attr["y"] = -attr["z"]
attr["z"] = y
mesh.translate([2, 2, 0.5])
v, f = mesh.to_vertices_and_faces()
# ==============================================================================
# Input geometry: 2D Pattern creation using Tessagon library, can be other mesh.
# ==============================================================================
options = {
"function": lambda u, v: [u, v, 0],
"u_range": [-0.25, 1.25],
"v_range": [-0.25, 1.25],
"u_num": 20,
"v_num": 20,
"u_cyclic": False,
"v_cyclic": False,
"adaptor_class": ListAdaptor,
}
# Get pattern name and class based on selected pattern type
pattern_name, pattern_class = TESSAGON_TYPES[PATTERN_TYPE]
# Create the selected tessagon pattern
tessagon = pattern_class(**options)
tessagon_mesh = tessagon.create_mesh()
pv = tessagon_mesh["vert_list"]
pf = tessagon_mesh["face_list"]
# ==============================================================================
# Mapping: 3D Mesh, 2D Pattern, UV
# ==============================================================================
mv, mf = igl.map_mesh((v, f), (pv, pf))
mesh_mapped = Mesh.from_vertices_and_faces(mv, mf)
# ==============================================================================
# Viewer
# ==============================================================================
config = Config()
config.camera.target = [2, 2, 0.25]
config.camera.position = [5, 2, 1.5]
viewer = Viewer(config=config)
viewer.scene.add(mesh, name="mesh", show_faces=False, linecolor=Color.grey(), opacity=0.2)
viewer.scene.add(Mesh.from_vertices_and_faces(pv, pf), name="pattern2d")
viewer.scene.add(mesh_mapped, name="mesh_mapped", facecolor=Color.red())
# To see where the pattern is mapped:
uv = igl.trimesh_lsc_mapping((v, f))
mesh_flattened = mesh.copy()
for i in range(mesh.number_of_vertices()):
mesh_flattened.vertex_attributes(i, "xyz", [uv[i][0], uv[i][1], 0])
viewer.scene.add(mesh_flattened, name="mesh_flattened")
viewer.show()

from compas.colors import Color
from compas.datastructures import Mesh
from compas_viewer import Viewer
from compas_viewer.config import Config
from tessagon.adaptors.list_adaptor import ListAdaptor
from tessagon.types.hex_tessagon import HexTessagon
import compas_libigl as igl
# ==============================================================================
# Input geometry: 3D Mesh
# ==============================================================================
mesh = Mesh.from_obj("data/minimal_surface.obj")
for key, attr in mesh.vertices(True):
y = attr["y"]
attr["y"] = -attr["z"]
attr["z"] = y
mesh.translate([2, 2, 0.5])
v, f = mesh.to_vertices_and_faces()
# ==============================================================================
# Input geometry: 2D Pattern creation using Tessagon library, can be other mesh.
# ==============================================================================
options = {
"function": lambda u, v: [u, v, 0],
"u_range": [-0.255, 1.33],
"v_range": [-0.34, 1.33],
"u_num": 16,
"v_num": 10,
"u_cyclic": False,
"v_cyclic": False,
"adaptor_class": ListAdaptor,
}
tessagon = HexTessagon(**options)
tessagon_mesh = tessagon.create_mesh()
pv = tessagon_mesh["vert_list"]
pf = tessagon_mesh["face_list"]
# ==============================================================================
# Mapping: 3D Mesh, 2D Pattern, UV
# ==============================================================================
mv, mf = igl.map_mesh((v, f), (pv, pf))
mesh_mapped = Mesh.from_vertices_and_faces(mv, mf)
# ==============================================================================
# Viewer
# ==============================================================================
config = Config()
config.camera.target = [2, 2, 0.25]
config.camera.position = [5, 2, 1.5]
viewer = Viewer(config=config)
viewer.scene.add(mesh, name="mesh", show_faces=False, linecolor=Color.grey(), opacity=0.2)
viewer.scene.add(Mesh.from_vertices_and_faces(pv, pf), name="pattern2d")
viewer.scene.add(mesh_mapped, name="mesh_mapped", facecolor=Color.red())
# To see where the pattern is mapped:
uv = igl.trimesh_lsc_mapping((v, f))
mesh_flattened = mesh.copy()
for i in range(mesh.number_of_vertices()):
mesh_flattened.vertex_attributes(i, "xyz", [uv[i][0], uv[i][1], 0])
viewer.scene.add(mesh_flattened, name="mesh_flattened")
viewer.show()

from math import pi
from compas.colors import Color
from compas.datastructures import Mesh
from compas.geometry import Polygon
from compas_viewer import Viewer
from compas_viewer.config import Config
from tessagon.adaptors.list_adaptor import ListAdaptor
from tessagon.types.hex_tessagon import HexTessagon
import compas_libigl as igl
# ==============================================================================
# Input geometry: 3D Mesh
# ==============================================================================
mesh = Mesh.from_obj("data/minimal_surface.obj")
for key, attr in mesh.vertices(True):
y = attr["y"]
attr["y"] = -attr["z"]
attr["z"] = y
mesh.translate([2, 2, 0.5])
v, f = mesh.to_vertices_and_faces()
# ==============================================================================
# Flattening
# ==============================================================================
# To see where the pattern is mapped:
uv = igl.trimesh_lsc_mapping((v, f))
mesh_flattened = mesh.copy()
for i in range(mesh.number_of_vertices()):
mesh_flattened.vertex_attributes(i, "xyz", [uv[i][0], uv[i][1], 0])
# ==============================================================================
# Input geometry: 2D Pattern creation using Tessagon library, can be other mesh.
# ==============================================================================
options = {
"function": lambda u, v: [u, v, 0],
"u_range": [-0.255, 1.33],
"v_range": [-0.34, 1.33],
"u_num": 16,
"v_num": 10,
"u_cyclic": False,
"v_cyclic": False,
"adaptor_class": ListAdaptor,
}
tessagon = HexTessagon(**options)
tessagon_mesh = tessagon.create_mesh()
pv = tessagon_mesh["vert_list"]
pf = tessagon_mesh["face_list"]
# rotate the pattern
rotated_mesh = Mesh.from_vertices_and_faces(pv, pf)
rotated_mesh.rotate(0 * pi / 180, [0, 0, 1])
pv, pf = rotated_mesh.to_vertices_and_faces()
# ==============================================================================
# Boundaries
# ==============================================================================
boundaries = igl.trimesh_boundaries(mesh_flattened.to_vertices_and_faces())
polygons = []
for vertices in boundaries:
vertices = list(vertices)
vertices.pop()
vertices.append(vertices[0])
points = mesh_flattened.vertices_attributes("xyz", keys=vertices)
polygons.append(Polygon(points))
# ==============================================================================
# 2D Boolean Intersection using Shapely
# ==============================================================================
polygons_cut = []
for face in pf:
points = []
for vertex in face:
points.append(pv[vertex])
polygon_cut = Polygon(points)
if len(points) > 2:
polygons_cut.append(polygon_cut)
# Polygon.boolean_intersection
intersections = []
for polygon_cut in polygons_cut:
for polygon in polygons:
from compas.geometry import boolean_intersection_polygon_polygon
coords = boolean_intersection_polygon_polygon(polygon, polygon_cut)
if len(coords) > 0:
intersection = Polygon([[x, y, 0] for x, y in coords]) # type: ignore
intersections.append(intersection)
mesh_cropped = Mesh.from_polygons(intersections)
pv, pf = mesh_cropped.to_vertices_and_faces()
# ==============================================================================
# Place the pattern mesh at the bottom left corner of the meshpattern_uv
# ==============================================================================
mv, mf = igl.map_mesh((v, f), (pv, pf))
mesh_mapped = Mesh.from_vertices_and_faces(mv, mf)
# ==============================================================================
# Viewer
# ==============================================================================
config = Config()
config.camera.target = [2, 2, 0.25]
config.camera.position = [5, 2, 1.5]
viewer = Viewer(config=config)
viewer.scene.add(mesh, name="mesh", show_faces=False, linecolor=Color.grey(), opacity=0.2)
viewer.scene.add(mesh_mapped, name="mesh_mapped", facecolor=Color.red())
viewer.scene.add(rotated_mesh, linecolor=Color.red(), linewidth=3)
viewer.scene.add(intersections, linecolor=Color.red(), linewidth=3)
viewer.scene.add(mesh_flattened, name="mesh_flattened0")
viewer.show()