Tree
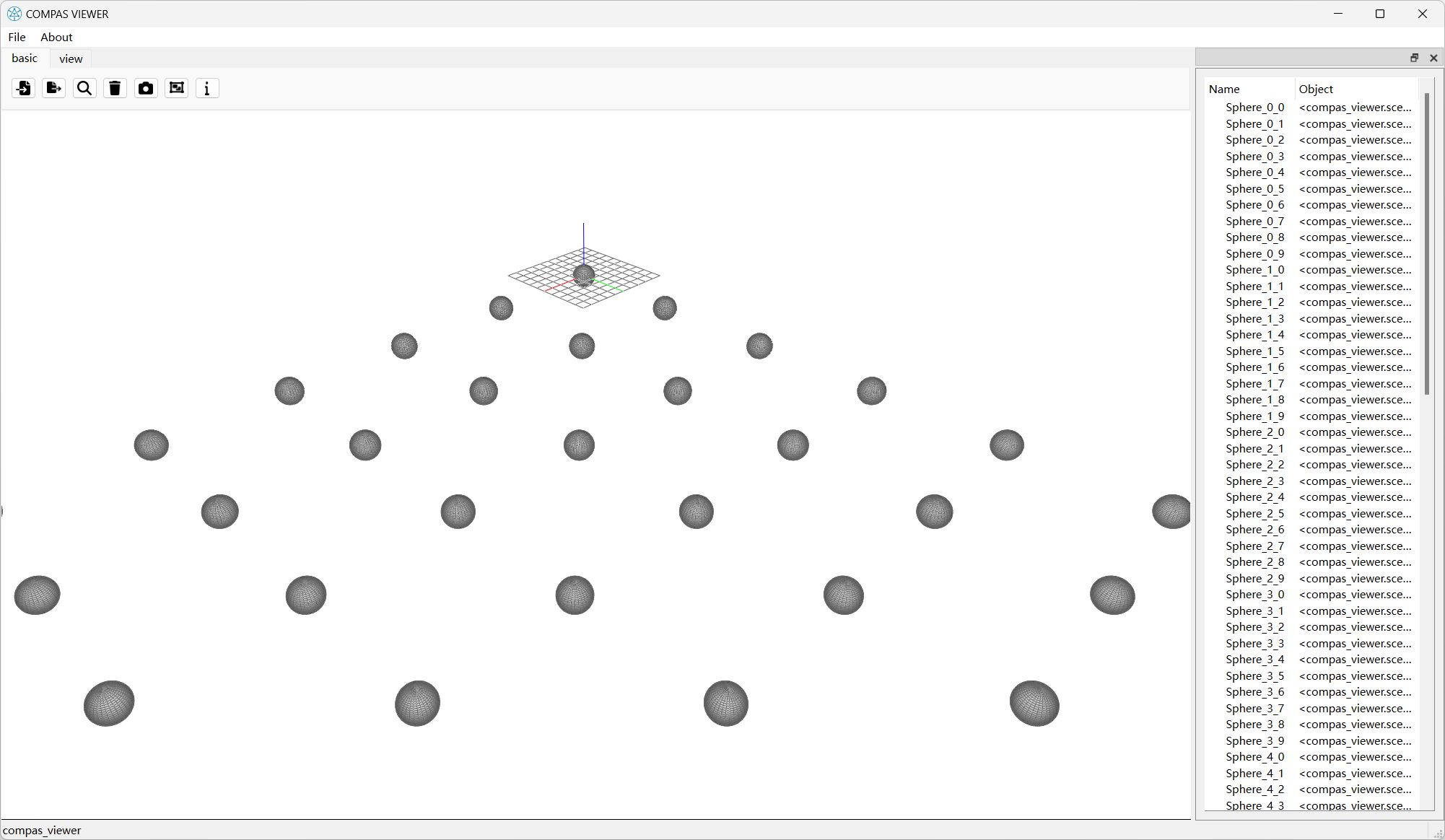
from compas.geometry import Frame
from compas.geometry import Sphere
from compas_viewer import Viewer
from compas_viewer.layout import Treeform
viewer = Viewer(rendermode="shaded")
viewer = Viewer()
for i in range(10):
for j in range(10):
sp = viewer.scene.add(Sphere(1, Frame([10 * i, 10 * j, 0], [1, 0, 0], [0, 1, 0])), name=f"Sphere_{i}_{j}")
viewer.layout.sidedock.add_element(Treeform(viewer.scene, {"Name": (lambda o: o.name), "Object": (lambda o: o)}))
viewer.show()