from compas.colors import Color
from compas.geometry import Box
from compas.geometry import Frame
from compas_viewer import Viewer
from compas_viewer.layout import Treeform
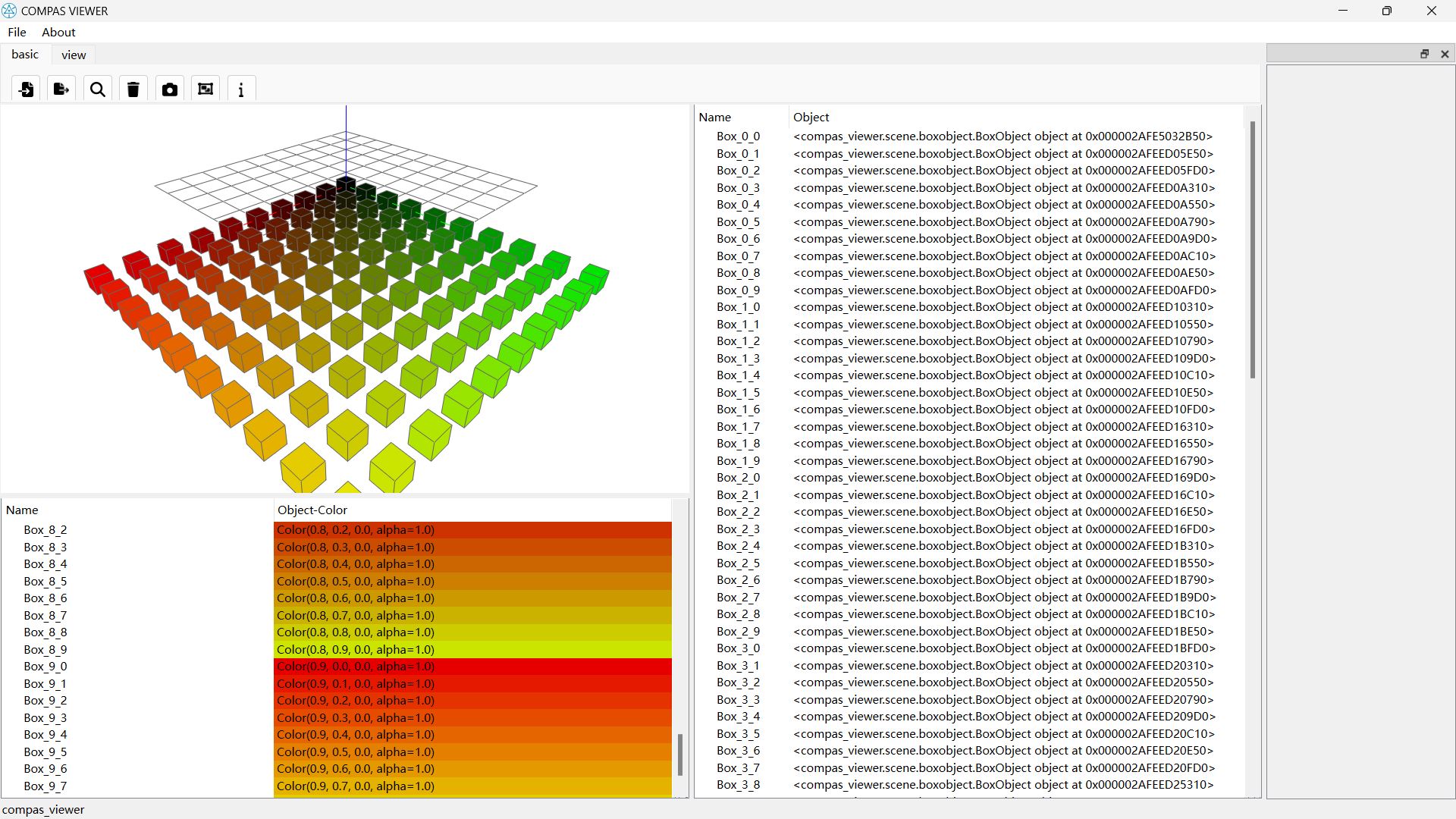
viewer = Viewer(rendermode="shaded")
for i in range(10):
for j in range(10):
viewer.scene.add(
Box(0.5, 0.5, 0.5, Frame([i, j, 0], [1, 0, 0], [0, 1, 0])),
show_points=False,
show_lines=True,
surfacecolor=Color(i / 10, j / 10, 0.0),
name=f"Box_{i}_{j}",
)
form_ids = Treeform(viewer.scene, {"Name": (lambda o: o.name), "Object": (lambda o: o)})
viewer.layout.viewport.add_element(form_ids)
# form_colors = Treeform(
# viewer.scene,
# {"Name": (lambda o: o.name), "Object-Color": (lambda o: o.surfacecolor)},
# backgrounds={"Object-Color": (lambda o: o.surfacecolor)},
# )
# viewer.layout.viewport.add_element(form_colors, False)
viewer.show()