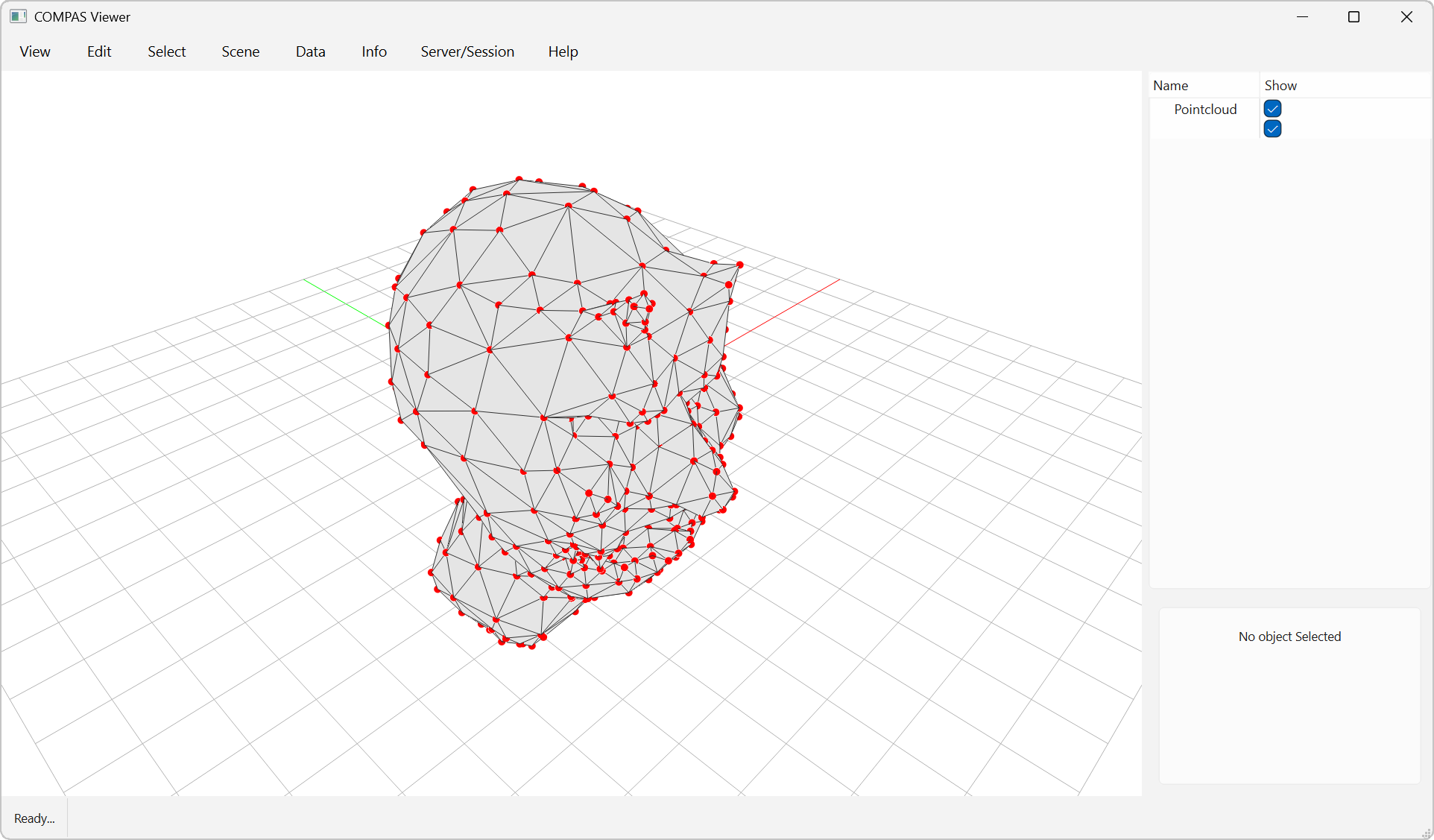
Poisson Surface Reconstruction
This example demonstrates how to perform Poisson surface reconstruction from a point cloud with normals using COMPAS CGAL.
Key Features:
Loading point clouds with normals from XYZ files
Poisson surface reconstruction to create a mesh
Mesh transformation and visualization
Side-by-side display of input points and reconstructed mesh
import math
from pathlib import Path
from compas.datastructures import Mesh
from compas.geometry import Pointcloud
from compas.geometry import Rotation
from compas.geometry import Scale
from compas_viewer import Viewer
from line_profiler import profile
from compas_cgal.reconstruction import poisson_surface_reconstruction
@profile
def reconstruction_poisson_surface_reconstruction():
FILE = Path(__file__).parent.parent.parent / "data" / "oni.xyz"
points = []
normals = []
with open(FILE, "r") as f:
for line in f:
x, y, z, nx, ny, nz = line.strip().split()
points.append([float(x), float(y), float(z)])
normals.append([float(nx), float(ny), float(nz)])
V, F = poisson_surface_reconstruction(points, normals)
mesh = Mesh.from_vertices_and_faces(V, F)
c = Pointcloud(V)
return c, mesh
points, mesh = reconstruction_poisson_surface_reconstruction()
# ==============================================================================
# Visualize
# ==============================================================================
viewer = Viewer()
viewer.renderer.camera.target = [0, 0, 0]
viewer.renderer.camera.position = [0, -0.2, 2.0]
viewer.scene.add(points, pointsize=10, pointcolor=(255, 0, 0))
viewer.scene.add(mesh, show_points=False)
viewer.show()