Point Cloud Outlier Removal
This example demonstrates how to remove outliers from a point cloud using COMPAS CGAL.
Key Features:
Loading point clouds from PLY files
Removing outliers based on neighborhood analysis
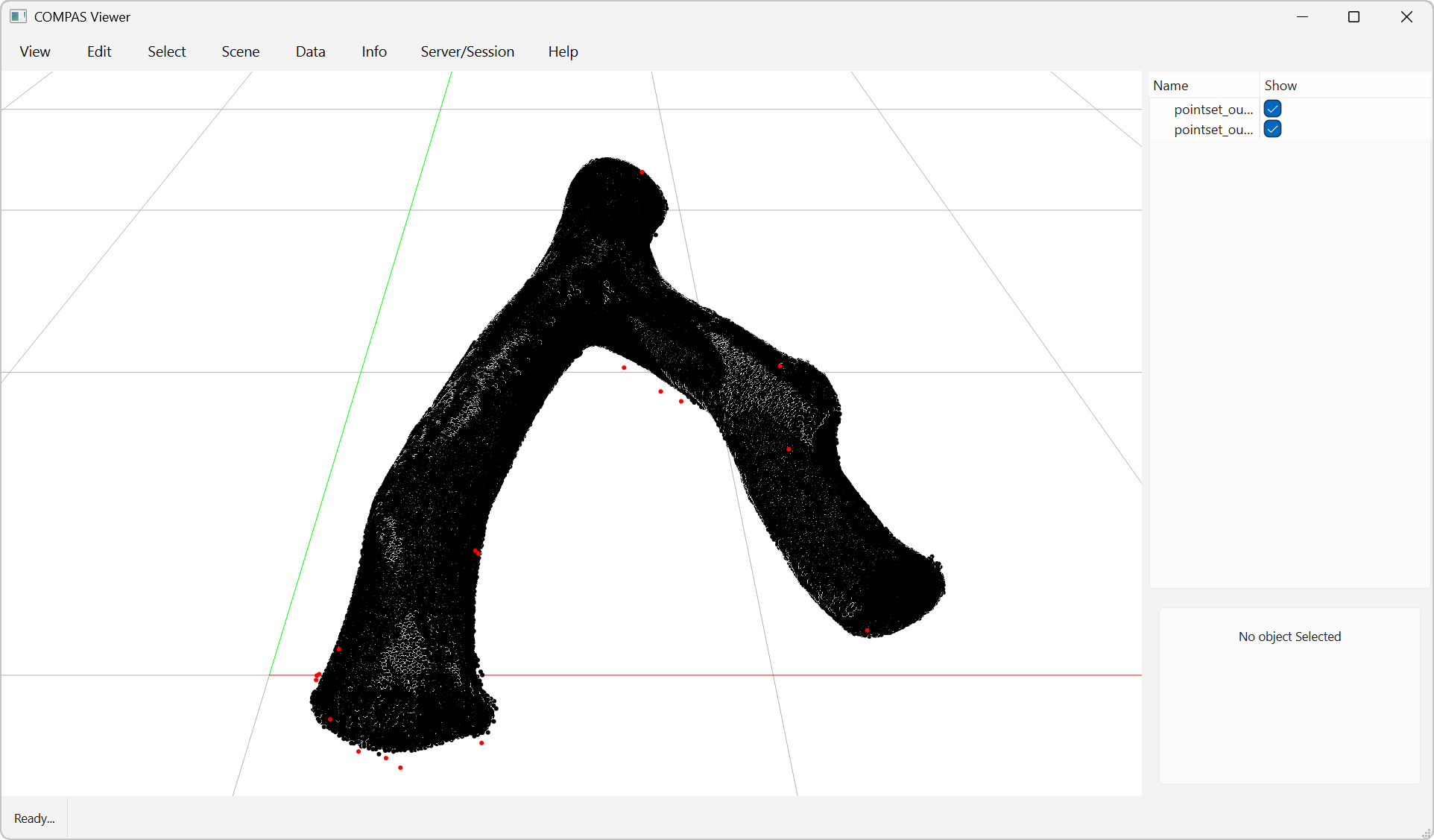
Visualization of inliers and outliers with different colors
Point cloud difference computation
from pathlib import Path
from compas.geometry import Pointcloud
from compas_viewer import Viewer
from compas_viewer.config import Config
from line_profiler import profile
from compas_cgal.reconstruction import pointset_outlier_removal
@profile
def reconstruction_pointset_outlier_removal():
"""Remove outliers from a point set."""
# ==============================================================================
# Input geometry
# ==============================================================================
FILE = Path(__file__).parent.parent.parent / "data" / "forked_branch_1.ply"
c1 = Pointcloud.from_ply(FILE)
# ==============================================================================
# Compute
# ==============================================================================
points = pointset_outlier_removal(c1, 30, 2.0)
c2 = Pointcloud(points)
c3 = c1.difference(c2)
return c2, c3
c_outlier_removal_0, c_outlier_removal_1 = reconstruction_pointset_outlier_removal()
# ==============================================================================
# Visualize
# ==============================================================================
config = Config()
config.camera.target = [600, 500, 200]
config.camera.position = [600, -1000, 1500]
config.camera.scale = 100
config.renderer.gridsize = (20000, 20, 20000, 20)
viewer = Viewer(config=config)
viewer.scene.add(c_outlier_removal_0, pointcolor=(0.0, 0.0, 0.0))
viewer.scene.add(c_outlier_removal_1, pointcolor=(1.0, 0.0, 0.0))
viewer.show()