from random import choice
import compas
from compas.datastructures import Mesh
from compas.topology import astar_shortest_path
from compas_gmsh.models import MeshModel
from compas_gmsh.options import MeshAlgorithm
from compas_viewer import Viewer
# ==============================================================================
# Input
# ==============================================================================
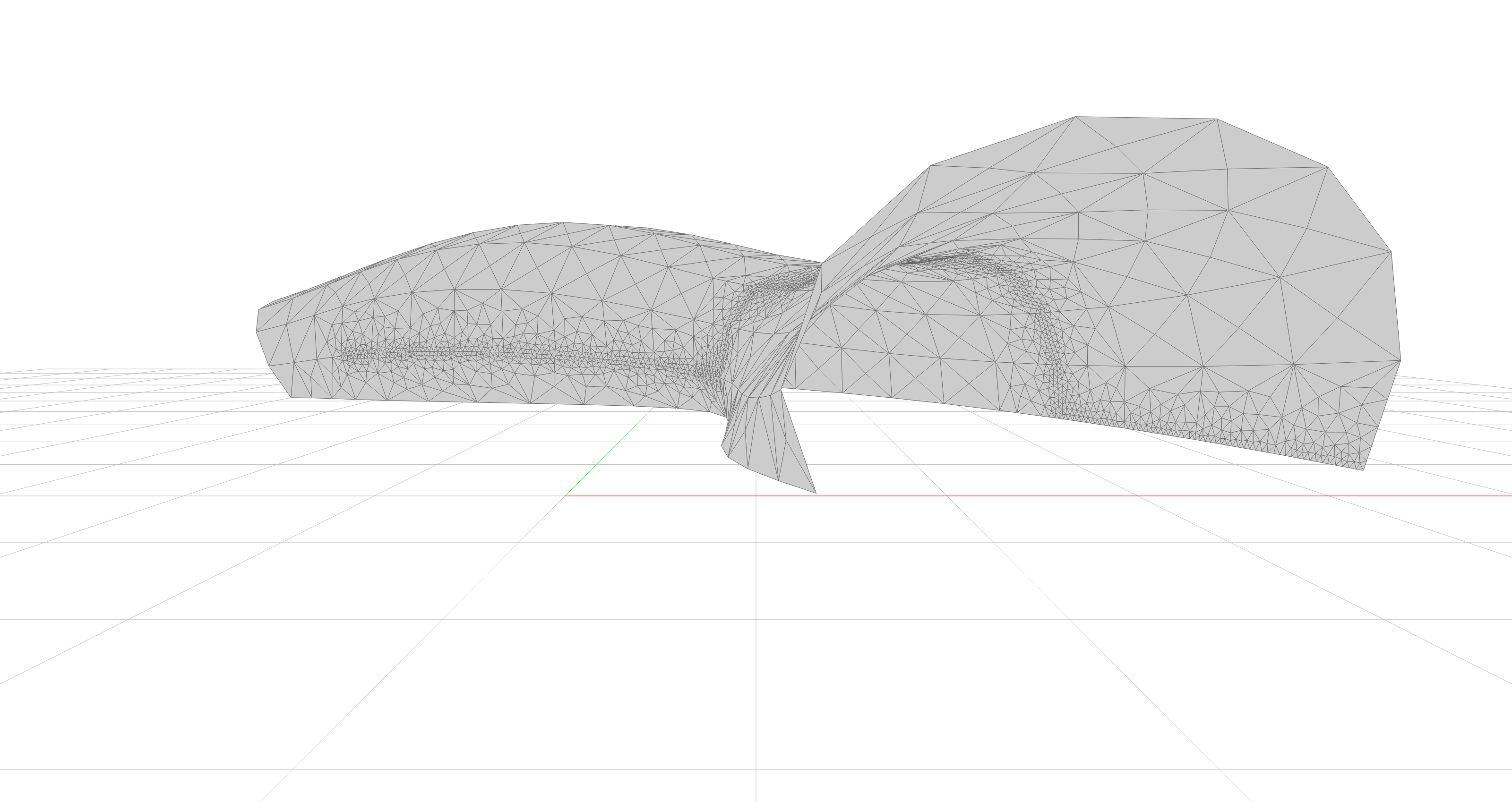
mesh = Mesh.from_obj(compas.get("tubemesh.obj"))
# =============================================================================
# Target lengths
# =============================================================================
targetlength = {vertex: 1.0 for vertex in mesh.vertices()}
corners = list(mesh.vertices_where(vertex_degree=2))
start = choice(list(set(mesh.vertices()) - set(mesh.vertices_on_boundary())))
end = choice(corners)
for vertex in astar_shortest_path(mesh, start, end):
targetlength[vertex] = 0.05
# ==============================================================================
# GMSH model
# ==============================================================================
model = MeshModel.from_mesh(mesh, name="tubemesh", targetlength=targetlength)
model.options.mesh.algorithm = MeshAlgorithm.FrontalDelaunay
model.generate_mesh()
# ==============================================================================
# COMPAS mesh
# ==============================================================================
mesh = model.mesh_to_compas()
# ==============================================================================
# Visualize
# ==============================================================================
viewer = Viewer()
viewer.renderer.camera.target = [1, 5, 0]
viewer.renderer.camera.position = [1, -5, 1]
viewer.scene.add(mesh, show_points=False)
viewer.show()