from pathlib import Path
from compas.colors import Color
from compas.geometry import Polyline
from compas.datastructures import Mesh
from compas_viewer import Viewer
from compas_viewer.config import Config
from tessagon.adaptors.list_adaptor import ListAdaptor
from tessagon.types.zig_zag_tessagon import ZigZagTessagon
from compas_libigl.mapping import map_mesh
from compas_libigl.parametrisation import trimesh_lsc_mapping
from compas import json_dump
# ==============================================================================
# Input geometry: 3D Mesh
# ==============================================================================
mesh = Mesh.from_off(Path(__file__).parent.parent.parent / "data" / "beetle.off")
for vertex in mesh.vertices():
x, y, z = mesh.vertex_attributes(vertex, "xyz") # type: ignore
mesh.vertex_attributes(vertex, "xyz", [x, -z, y])
mesh.translate([2, 2, 0.5])
v, f = mesh.to_vertices_and_faces()
# ==============================================================================
# Input geometry: 2D Pattern creation using Tessagon library, can be other mesh.
# ==============================================================================
options = {
"function": lambda u, v: [u * 1, v * 1, 0],
"u_range": [-0.255, 1.33],
"v_range": [-0.34, 1.33],
"u_num": 20,
"v_num": 20,
"u_cyclic": False,
"v_cyclic": False,
"adaptor_class": ListAdaptor,
}
tessagon = ZigZagTessagon(**options)
tessagon_mesh = tessagon.create_mesh()
pv = tessagon_mesh["vert_list"]
pf = tessagon_mesh["face_list"]
# ==============================================================================
# Mapping: 3D Mesh, 2D Pattern, UV
# mv - mapped vertices
# mf - mapped faces
# mn - mapped normals
# mg - mapped boundaries (True or False)
# mb - mapped groups for polygons with holes (list of int)
# ==============================================================================
mv, mf, mn, mb, mg = map_mesh((v, f), (pv, pf))
mesh_mapped = Mesh.from_vertices_and_faces(mv, mf)
# ==============================================================================
# Offset mesh by normals, normals are interpolated from the original mesh.
# ==============================================================================
mesh_mapped_offset = mesh_mapped.copy()
for i in range(mesh_mapped.number_of_vertices()):
mesh_mapped_offset.vertex_attributes(i, "xyz", mesh_mapped.vertex_attributes(i, "xyz") - mn[i]*0.001)
# ==============================================================================
# Get Boundary Polylines
# ==============================================================================
boundaries = []
for i in range(len(mb)):
if not mb[i]:
continue
points = []
for j in range(len(mf[i])):
id = mf[i][j]
points.append(mesh_mapped.vertex_attributes(id, "xyz") + mn[id]*0.002)
points.append(points[0])
polyline = Polyline(points)
boundaries.append(polyline)
# ==============================================================================
# Viewer
# ==============================================================================
config = Config()
config.camera.target = [2, 2, 0.25]
config.camera.position = [5, 2, 1.5]
viewer = Viewer(config=config)
# viewer.scene.add(mesh, name="mesh", show_faces=False, linecolor=Color.grey(), opacity=0.2)
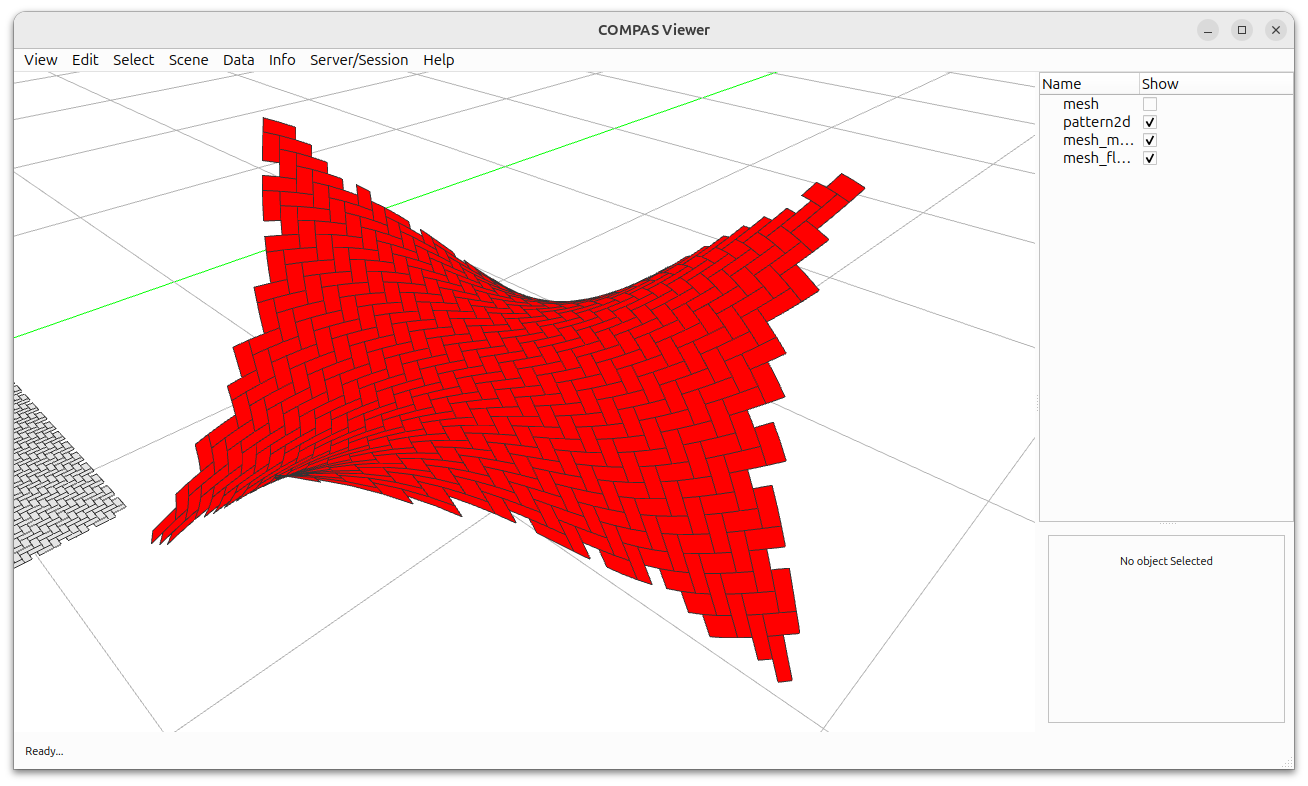
viewer.scene.add(Mesh.from_vertices_and_faces(pv, pf), name="pattern2d")
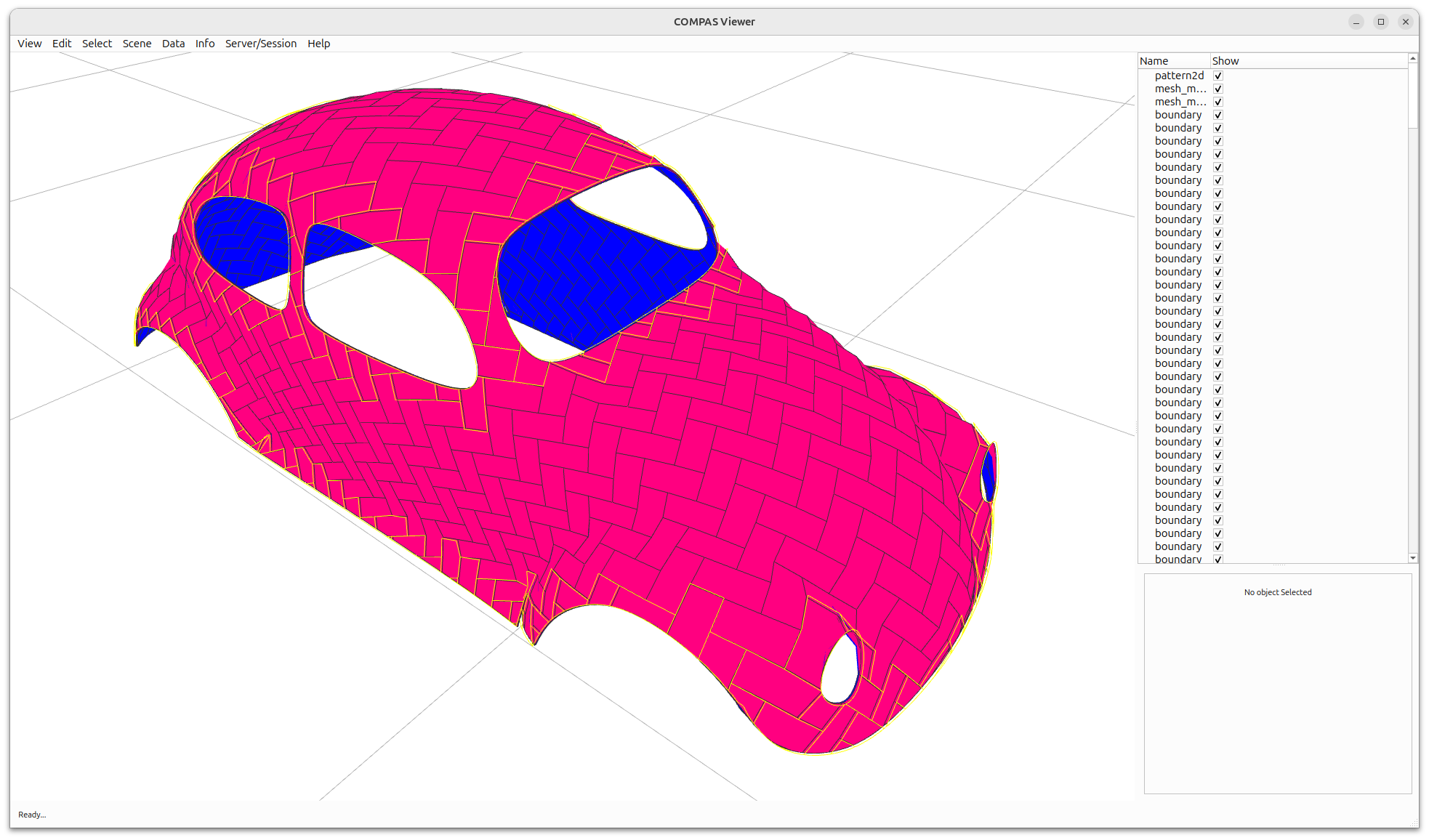
viewer.scene.add(mesh_mapped, name="mesh_mapped", facecolor=Color.pink())
viewer.scene.add(mesh_mapped_offset, name="mesh_mapped", facecolor=Color.blue())
for boundary in boundaries:
viewer.scene.add(boundary, name="boundary", linecolor=Color.yellow(), linewidth=3)
# To see where the pattern is mapped:
uv = trimesh_lsc_mapping((v, f))
mesh_flattened = mesh.copy()
for i in range(mesh.number_of_vertices()):
mesh_flattened.vertex_attributes(i, "xyz", [uv[i][0], uv[i][1], 0])
viewer.scene.add(mesh_flattened, name="mesh_flattened")
viewer.show()