import math
from pathlib import Path
from compas.datastructures import Mesh
from compas.geometry import Rotation
from compas.geometry import Scale
from compas.geometry import Translation
from compas_viewer import Viewer
from compas_libigl.parametrisation import trimesh_lsc_mapping
# ==============================================================================
# Input geometry
# ==============================================================================
mesh = Mesh.from_off(Path(__file__).parent.parent.parent / "data" / "camelhead.off")
R0 = Rotation.from_axis_and_angle([1, 0, 0], math.radians(90))
R1 = Rotation.from_axis_and_angle([0, 1, 0], math.radians(90))
mesh.transform(R0 * R1)
mesh.translate([0, 0.5, 0.5])
mesh_lscm = mesh.copy()
mesh_lscm.vertices_attribute("z", 0)
# ==============================================================================
# Least-squares conformal map
# ==============================================================================
# lscm_uv = igl.trimesh_harmonic_mapping(mesh.to_vertices_and_faces())
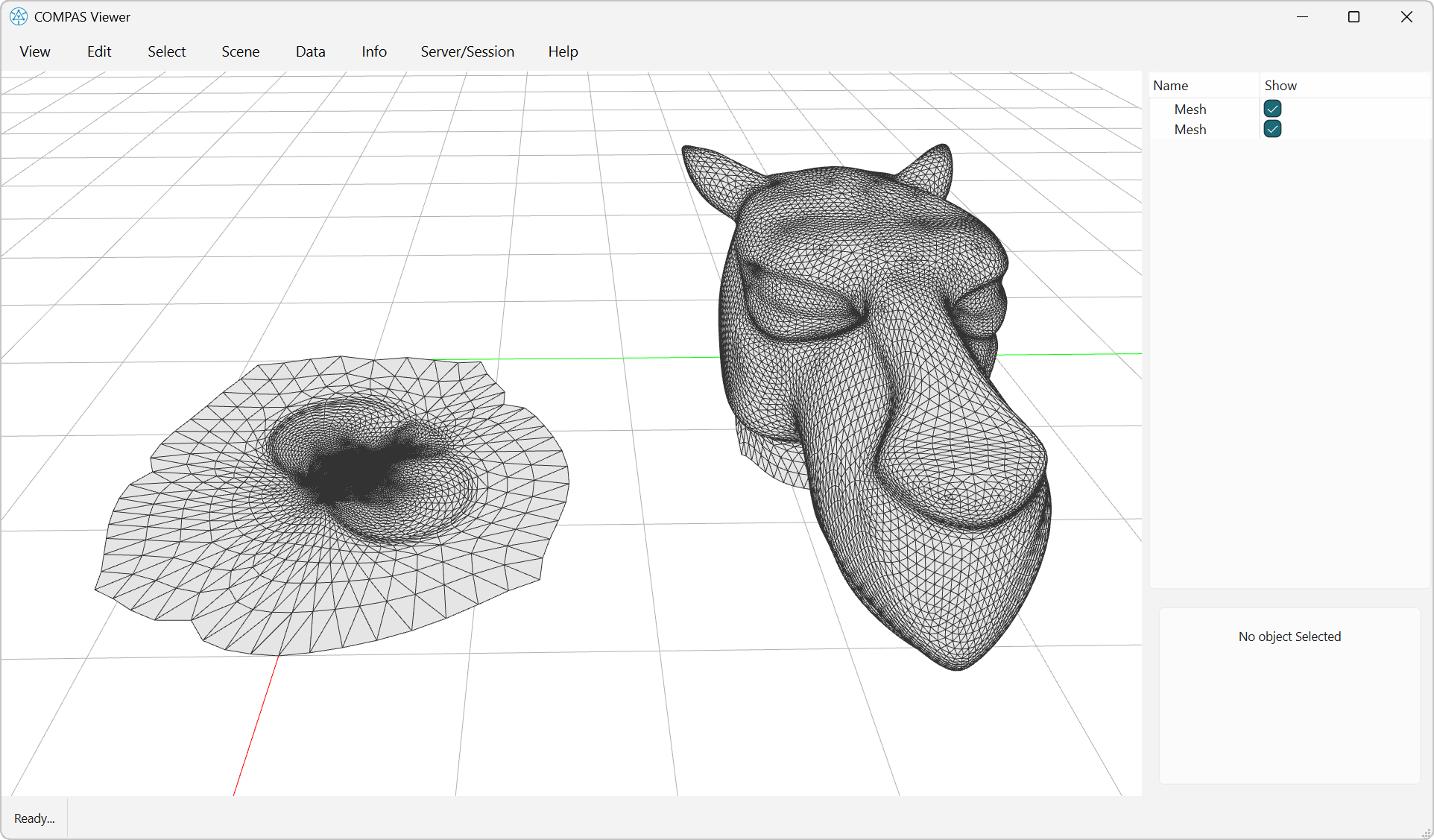
lscm_uv = trimesh_lsc_mapping(mesh.to_vertices_and_faces())
for index, key in enumerate(mesh.vertices()):
mesh_lscm.vertex_attributes(key, "xy", lscm_uv[index])
# ==============================================================================
# Visualization
# ==============================================================================
X = Translation.from_vector([2.5, 1.5, 0]) * Scale.from_factors([3, 3, 3])
mesh.transform(X)
viewer = Viewer()
viewer.scene.add(mesh, show_points=False)
viewer.scene.add(mesh_lscm, show_points=False)
viewer.show()