import compas
import compas_libigl as igl
import numpy as np
from compas.colors import Color
from compas.datastructures import Mesh
from compas.geometry import Line
from compas.geometry import Point
from compas_viewer import Viewer
# ==============================================================================
# Input geometry
# ==============================================================================
mesh = Mesh.from_obj(compas.get("tubemesh.obj"))
trimesh = mesh.copy()
trimesh.quads_to_triangles()
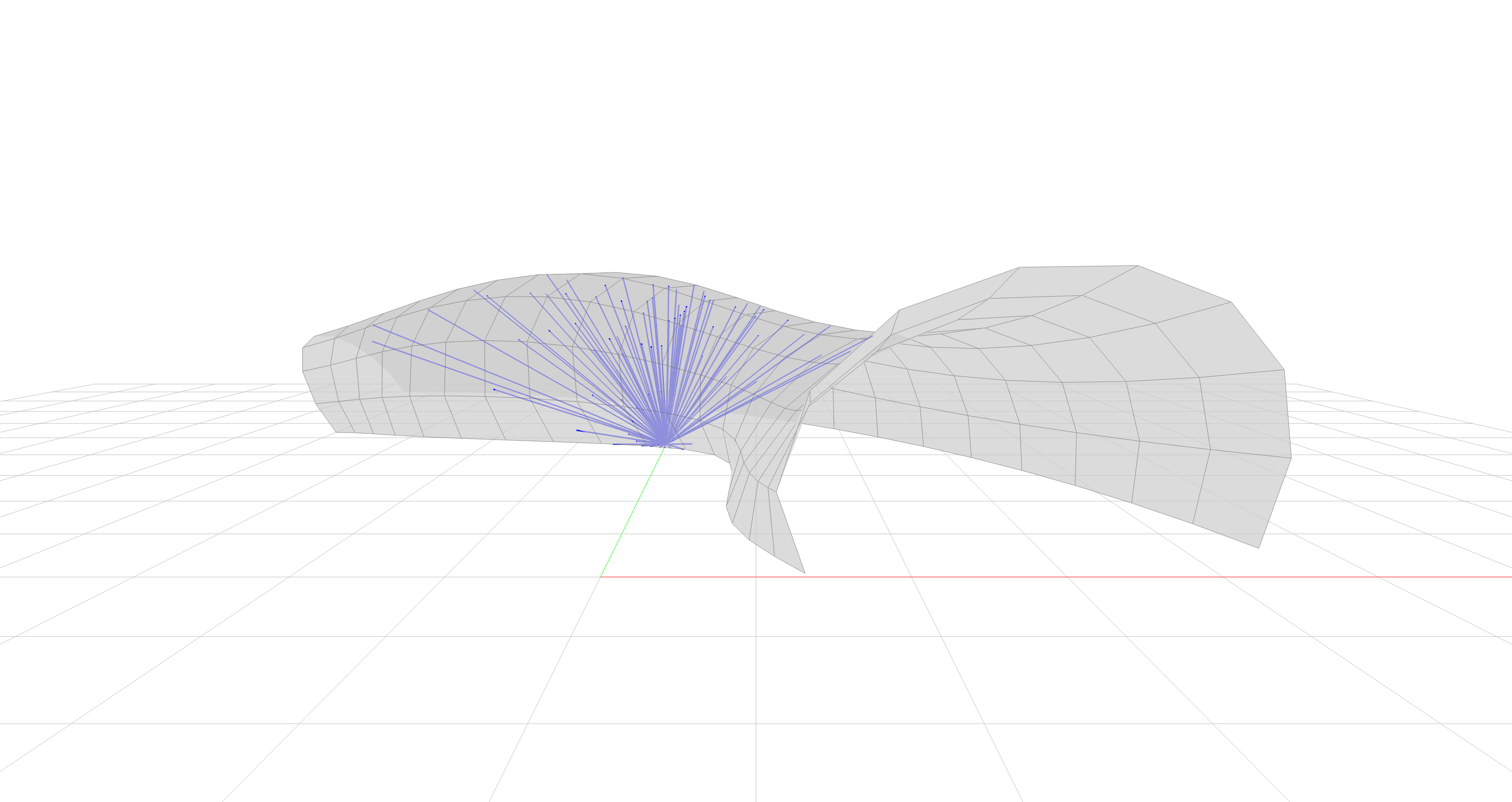
# ==============================================================================
# Rays
# ==============================================================================
base = Point(*mesh.centroid())
base.z = 0
theta = np.linspace(0, np.pi, 20, endpoint=False)
phi = np.linspace(0, 2 * np.pi, 20, endpoint=False)
theta, phi = np.meshgrid(theta, phi)
theta = theta.ravel()
phi = phi.ravel()
r = 1.0
x = r * np.sin(theta) * np.cos(phi) + base.x
y = r * np.sin(theta) * np.sin(phi) + base.y
z = r * np.cos(theta)
xyz = np.vstack((x, y, z)).T
mask = xyz[:, 2] > 0
hemi = xyz[mask]
rays = []
for x, y, z in hemi:
point = Point(x, y, z)
vector = point - base
vector.unitize()
rays.append((base, vector))
# ==============================================================================
# Intersections
# ==============================================================================
index_face = {index: face for index, face in enumerate(mesh.faces())}
hits_per_ray = igl.intersection_rays_mesh(rays, mesh.to_vertices_and_faces())
intersections = []
for ray, hits in zip(rays, hits_per_ray):
if hits:
base, vector = ray
index = hits[0][0]
distance = hits[0][3]
face = index_face[index]
point = base + vector * distance
intersections.append(point)
# ==============================================================================
# Visualisation
# ==============================================================================
viewer = Viewer(width=1600, height=900)
# viewer.view.camera.position = [1, -6, 2]
# viewer.view.camera.look_at([1, 1, 1])
viewer.scene.add(mesh, opacity=0.7, show_points=False)
for intersection in intersections:
viewer.scene.add(Line(base, intersection), linecolor=Color.blue(), linewidth=3)
viewer.show()