import compas
import compas_libigl as igl
from compas.colors import Color
from compas.colors import ColorMap
from compas.datastructures import Mesh
from compas.datastructures import mesh_flatness
from compas_viewer import Viewer
# ==============================================================================
# Input
# ==============================================================================
TOL = 0.02
MAXDEV = 0.005
KMAX = 500
mesh = Mesh.from_obj(compas.get("tubemesh.obj"))
# ==============================================================================
# Planarize
# ==============================================================================
V, F = mesh.to_vertices_and_faces()
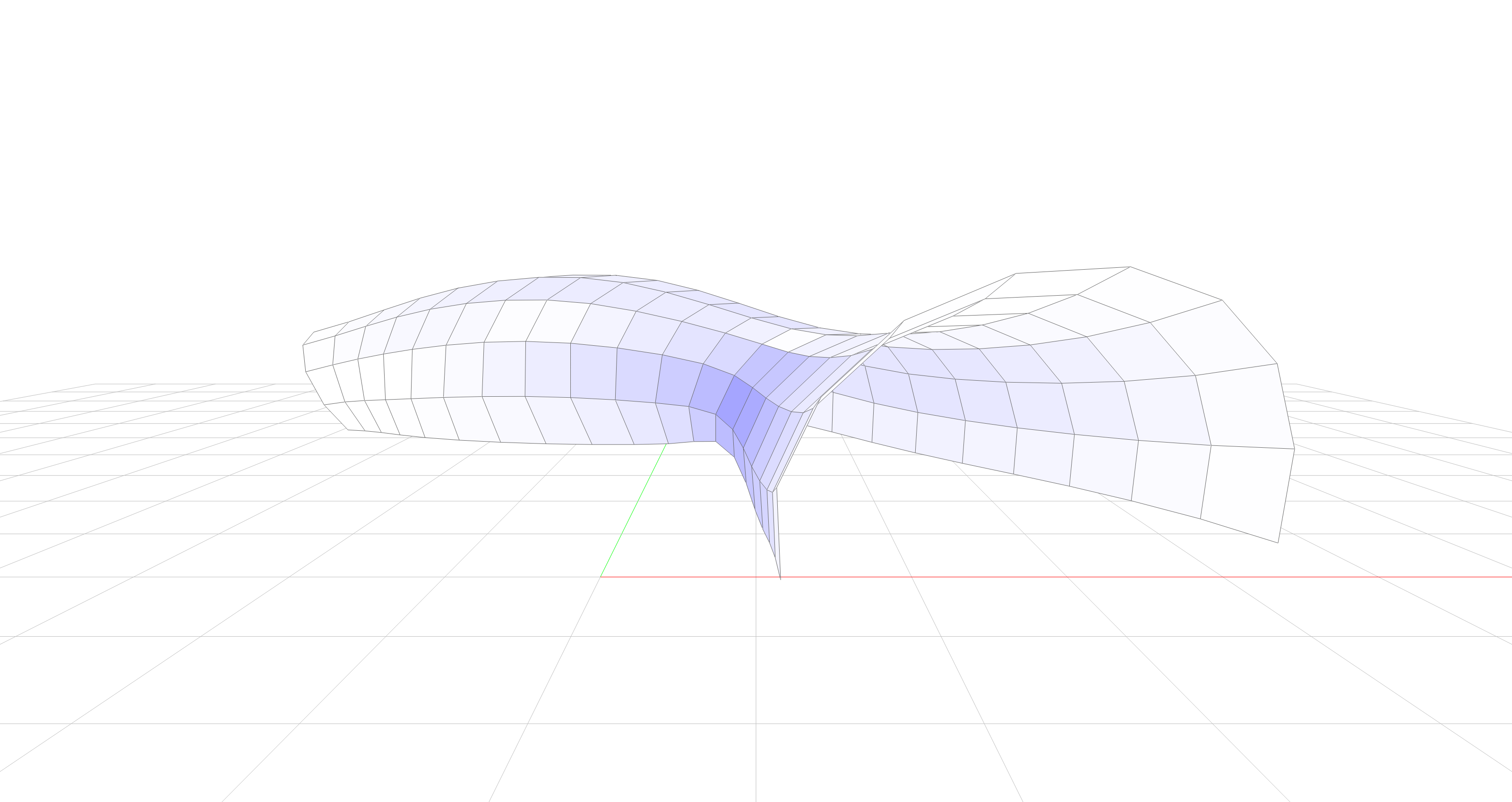
V2 = igl.quadmesh_planarize((V, F), KMAX, MAXDEV)
# ==============================================================================
# Visualize
# ==============================================================================
mesh = Mesh.from_vertices_and_faces(V2, F)
dev = mesh_flatness(mesh, maxdev=TOL)
cmap = ColorMap.from_two_colors(Color.white(), Color.blue())
viewer = Viewer(width=1600, height=900)
# viewer.view.camera.position = [1, -6, 2]
# viewer.view.camera.look_at([1, 1, 1])
viewer.scene.add(
mesh,
facecolor={face: (cmap(dev[face]) if dev[face] <= 1.0 else Color.red()) for face in mesh.faces()},
show_points=False,
)
viewer.show()