from math import radians
from compas.geometry import NurbsSurface
from compas.geometry import Point
from compas.geometry import Polyline
from compas.geometry import Rotation
from compas.geometry import Translation
from compas_viewer import Viewer
points = [
[Point(0, 0, 0), Point(1, 0, 0), Point(2, 0, 0), Point(3, 0, 0), Point(4, 0, 0)],
[Point(0, 1, 0), Point(1, 1, 2), Point(2, 1, 2), Point(3, 1, 0), Point(4, 1, 0)],
[Point(0, 2, 0), Point(1, 2, 2), Point(2, 2, 2), Point(3, 2, 0), Point(4, 2, 0)],
[Point(0, 3, 0), Point(1, 3, 0), Point(2, 3, 0), Point(3, 3, 0), Point(4, 3, 0)],
]
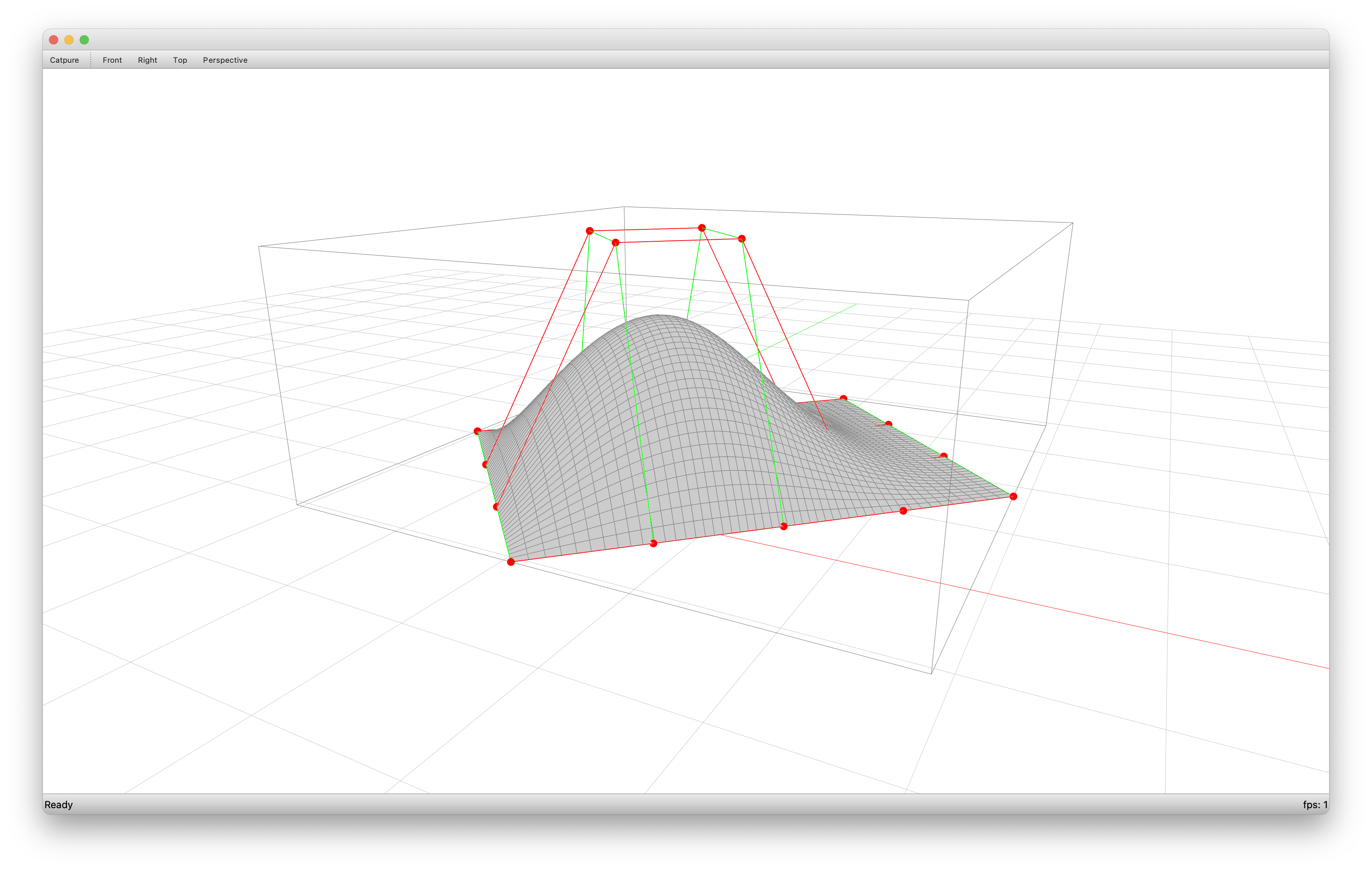
surface = NurbsSurface.from_points(points=points)
T = Translation.from_vector([0, -1.5, 0])
R = Rotation.from_axis_and_angle([0, 0, 1], radians(45))
surface.transform(R * T)
# ==============================================================================
# AABB
# ==============================================================================
box = surface.aabb()
# ==============================================================================
# Visualisation
# ==============================================================================
viewer = Viewer()
for row in surface.points:
viewer.scene.add(
Polyline(row),
show_points=True,
pointsize=20,
pointcolor=(1, 0, 0),
lineswidth=2,
linecolor=(1.0, 0, 0),
)
for col in zip(*surface.points):
viewer.scene.add(Polyline(col), lineswidth=2, linecolor=(0, 1.0, 0))
viewer.scene.add(surface, show_lines=False)
viewer.scene.add(box, show_faces=False)
viewer.show()