# type: ignore
from math import radians
from compas.geometry import Box, Plane, Rotation
from compas.geometry import is_point_infront_plane
from compas.colors import Color
from compas_occ.brep import OCCBrep as Brep
from compas_view2.app import App
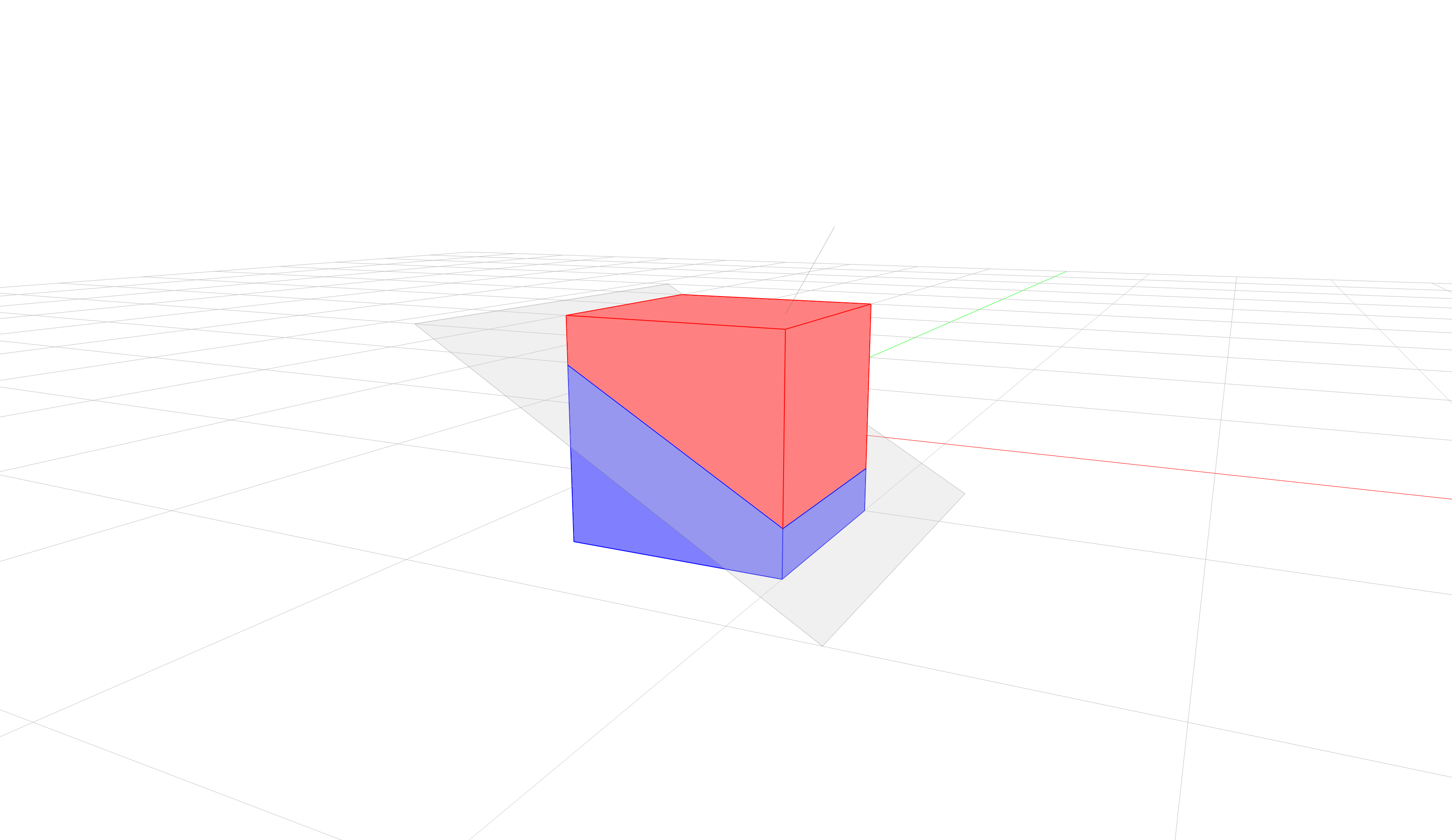
box = Box.from_width_height_depth(1, 1, 1).to_brep()
R = Rotation.from_axis_and_angle([0, 1, 0], radians(30))
plane = Plane.worldXY()
plane.transform(R)
result = box.split(Brep.from_planes([plane]))
viewer = App()
viewer.view.camera.position = [2, -4, 1]
viewer.view.camera.look_at([0, 0, 0])
viewer.add(plane, linewidth=2, opacity=0.3)
for brep in result:
if is_point_infront_plane(brep.centroid, plane):
viewer.add(
brep,
facecolor=Color.red().lightened(50),
linecolor=Color.red(),
linewidth=2,
)
else:
viewer.add(
brep,
facecolor=Color.blue().lightened(50),
linecolor=Color.blue(),
linewidth=2,
)
viewer.show()