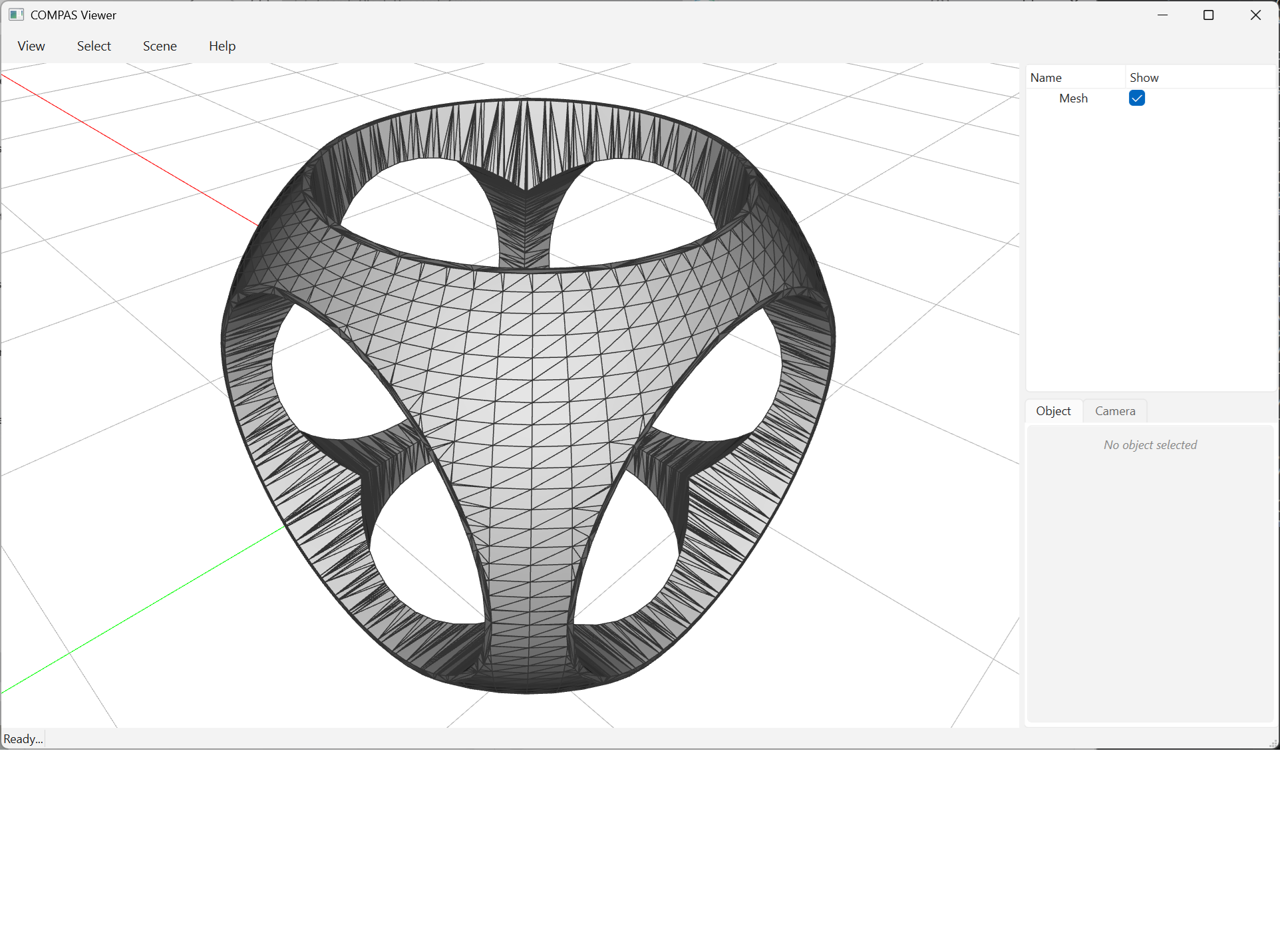
CSG: Rounded Cube Drilled Along Three Axes¤
A classic constructive solid geometry workflow expressed as a single
boolean_chain call:
- Rounded cube = cube ∩ sphere — the sphere clips the cube's corners.
- Drilled rounded cube = result − cyl_x − cyl_y − cyl_z, where each cylinder is centered at the origin and oriented along one world axis.
All five input meshes are sent to C++ in a single boolean_chain call.
Intermediate Surface_meshes never leave C++; only the final (V, F) is
returned to Python.
The cylinders meet at the origin — a degenerate configuration that would
trip CGAL's "Non-handled triple intersection" precondition during a naive
sequential subtraction with the inexact-constructions kernel. Between
corefinement steps boolean_chain applies CGAL 6.1's
autorefine_triangle_soup with apply_iterative_snap_rounding(true),
introduced specifically for this problem,
which makes the chain robust at radii up to ~0.7 in this geometry.
from compas.geometry import Box
from compas.geometry import Cylinder
from compas.geometry import Frame
from compas.geometry import Polyhedron
from compas.geometry import Sphere
from compas_viewer import Viewer
from compas_cgal.booleans import boolean_chain
# =============================================================================
# Classic CSG: rounded cube drilled along three axes.
# step 1: rounded cube = cube ∩ sphere
# step 2: result = rounded cube − cyl_x − cyl_y − cyl_z
#
# All five meshes are sent to C++ in a single boolean_chain() call. Each
# step's intermediate Surface_mesh stays in C++ — there is no Python ↔ C++
# round-tripping between operations. The chain runs in CGAL's exact-
# constructions kernel (EPECK), which handles the degenerate triple
# intersection at the origin where the three axis-aligned cylinders meet —
# no shifts needed. Pass `hybrid=True` to switch to the hybrid kernel
# scheme (EPICK mesh + EPECK vertex_point_map) from CGAL's "consecutive
# boolean operations with exact point maps" example.
# =============================================================================
cube = Box(2).to_vertices_and_faces(triangulated=True)
sphere = Sphere(1.3, point=[0, 0, 0]).to_vertices_and_faces(u=64, v=64, triangulated=True)
def cylinder_along(axis, radius=0.8):
"""A cylinder of length 4 oriented along a world axis.
`Cylinder` defines its long axis as the frame's z-axis, so we build a
frame whose z-axis matches the chosen world axis.
"""
if axis == "x":
frame = Frame([0, 0, 0], [0, 1, 0], [0, 0, 1])
elif axis == "y":
frame = Frame([0, 0, 0], [0, 0, 1], [1, 0, 0])
else: # "z"
frame = Frame([0, 0, 0], [1, 0, 0], [0, 1, 0])
return Cylinder(radius, 4.0, frame).to_vertices_and_faces(u=48, triangulated=True)
V, F = boolean_chain(
[cube, sphere, cylinder_along("x"), cylinder_along("y"), cylinder_along("z")],
["intersection", "difference", "difference", "difference"],
)
shape = Polyhedron(V.tolist(), F.tolist()).to_mesh()
# =============================================================================
# Visualize
# =============================================================================
viewer = Viewer()
viewer.scene.add(shape, lineswidth=1, show_points=False)
viewer.show()