Vector Generators
For using the ReachabilityMap we need a Frame generator function. In a
simple case, this can be only a list of frames. However, sometimes it makes
sense to generate multiple frames at a certain location that deviate a bit in
orientation. We provide 2 helper vector generators with very verbose names:
OrthonormalVectorsFromAxisGeneratorDeviationVectorsGenerator
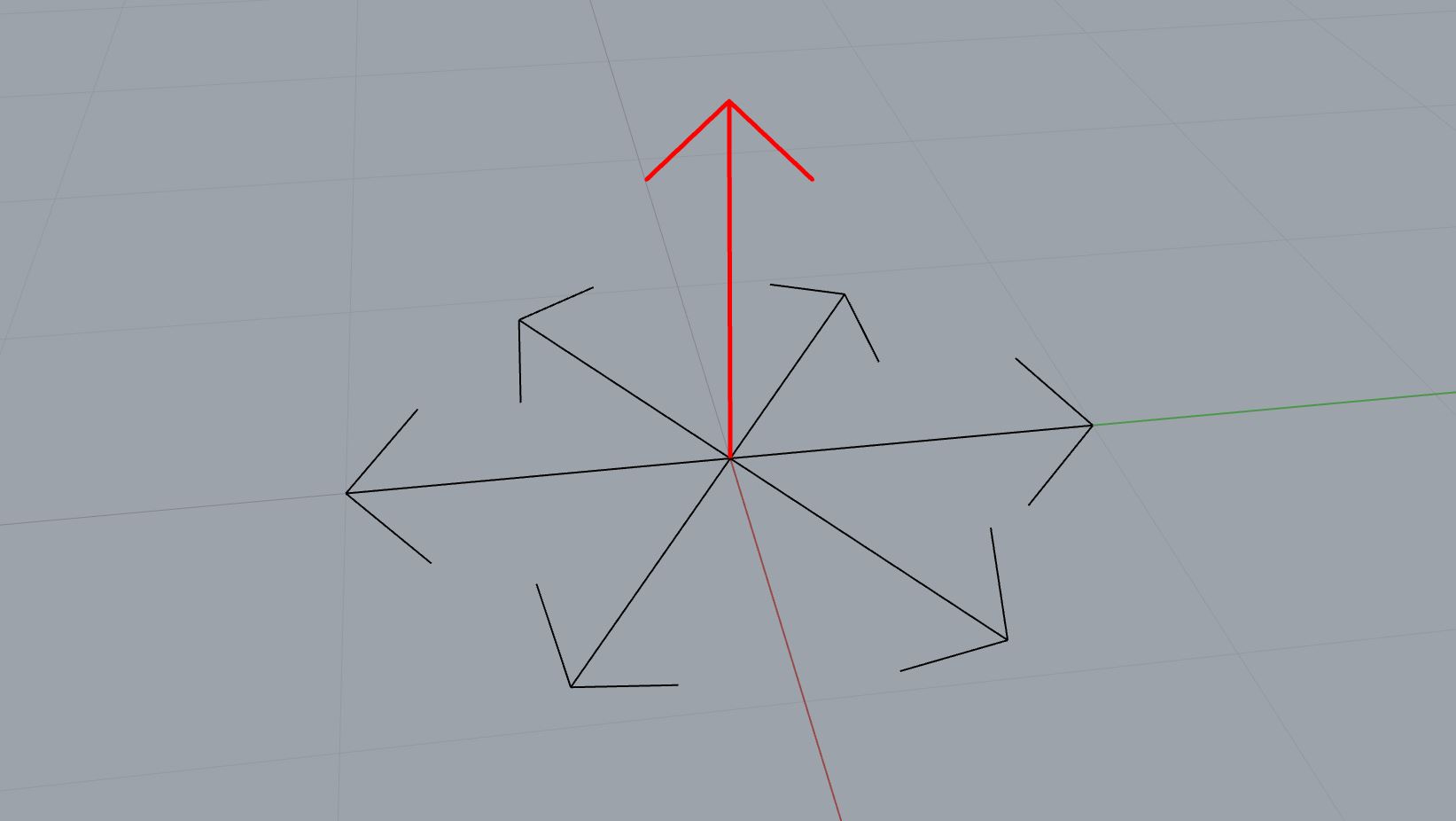
Generate orthonormal vectors from an axis
The OrthonormalVectorsFromAxisGenerator generates vectors that are orthonormal a given axis.
In the example below, the given axis is visualized in red, and the generated vectors in black.
>>> import math
>>> from compas.geometry import Vector
>>> from compas_fab.robots import OrthonormalVectorsFromAxisGenerator
>>> zaxis = Vector(0, 0, 1)
>>> max_alpha = 60
>>> for xaxis in OrthonormalVectorsFromAxisGenerator(zaxis, math.radians(max_alpha)):
... print(xaxis)
Vector(x=0.000, y=-1.000, z=0.000)
Vector(x=0.866, y=-0.500, z=0.000)
Vector(x=0.866, y=0.500, z=0.000)
Vector(x=0.000, y=1.000, z=0.000)
Vector(x=-0.866, y=0.500, z=0.000)
Vector(x=-0.866, y=-0.500, z=0.000)
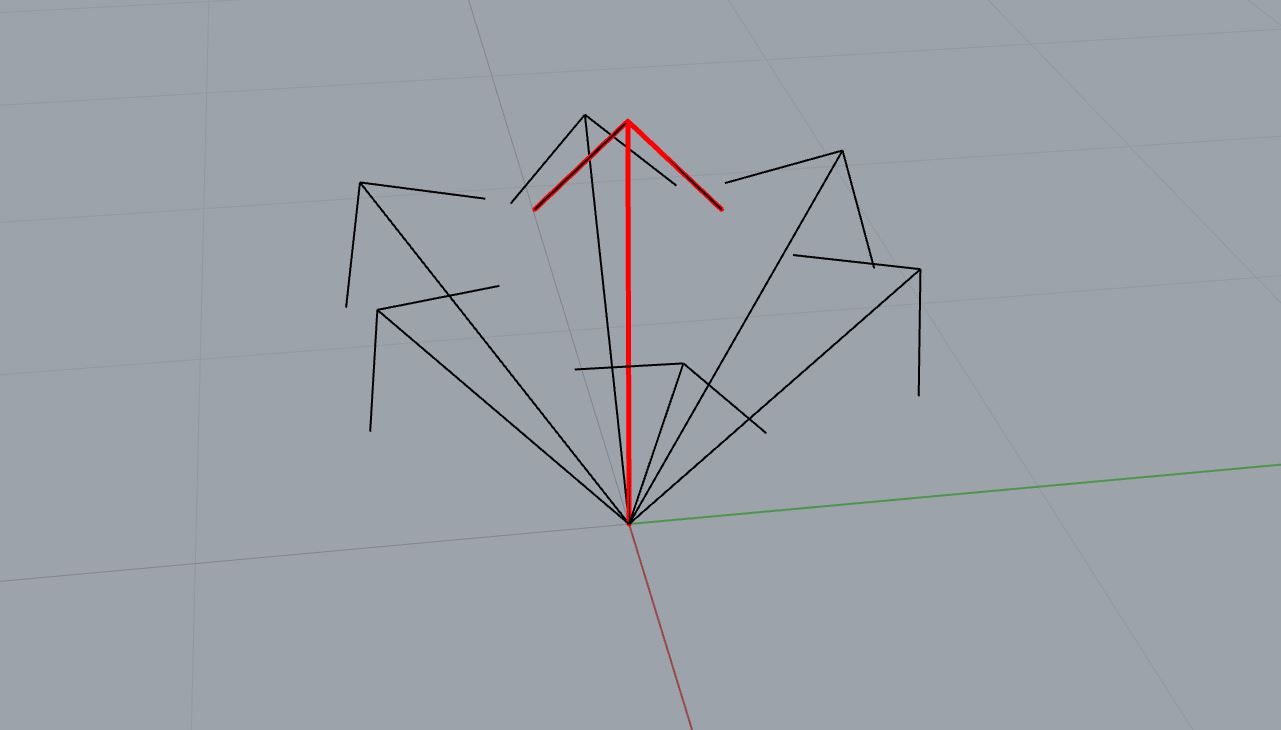
Generate vectors that deviate
The DeviationVectorsGenerator generates equally distributed vectors that deviate from the passed one by a maximal angle of max_alpha.
In the example below, the given axis is visualized in red, and the generated vectors in black.
>>> import math
>>> from compas_fab.robots import DeviationVectorsGenerator
>>> zaxis = Vector(0, 0, 1)
>>> max_alpha = 40
>>> step = 1
>>> for axis in DeviationVectorsGenerator(zaxis, math.radians(max_alpha), step):
... print(axis)
Vector(x=0.000, y=0.000, z=1.000)
Vector(x=-0.643, y=0.000, z=0.766)
Vector(x=-0.321, y=-0.557, z=0.766)
Vector(x=0.321, y=-0.557, z=0.766)
Vector(x=0.643, y=-0.000, z=0.766)
Vector(x=0.321, y=0.557, z=0.766)
Vector(x=-0.321, y=0.557, z=0.766)
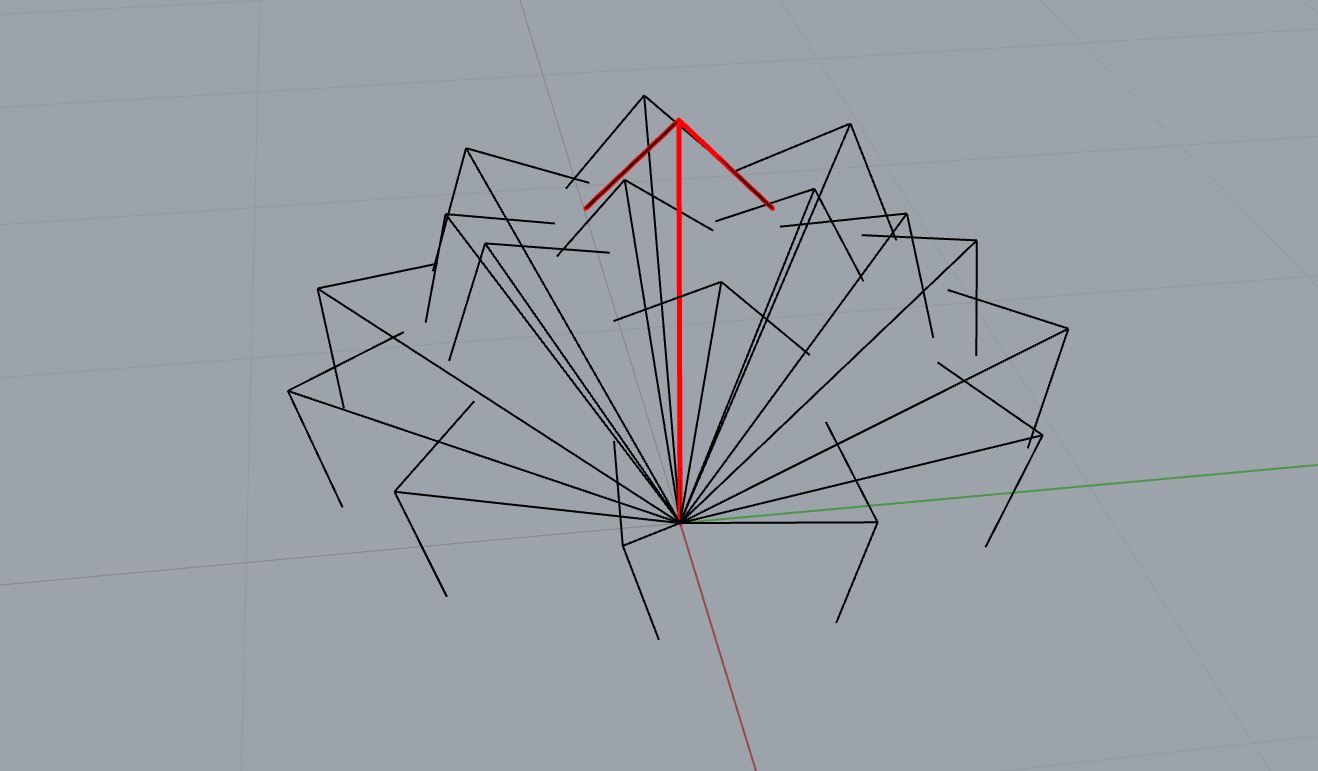
Or another example with using max_angle = 60 and step = 2.
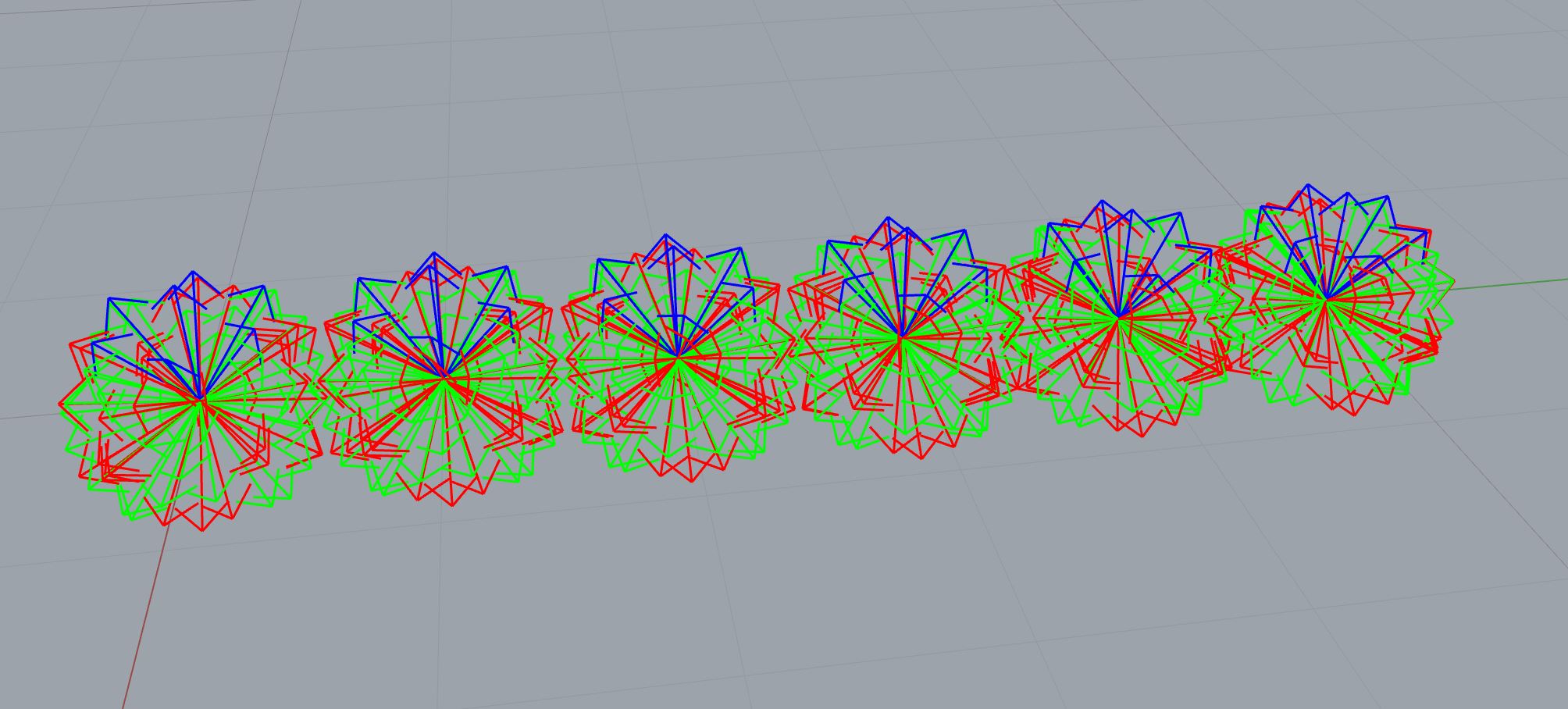
Generate frames
Now having these two vector generators, we can combine them for generating frames.
from compas.geometry import Frame
from compas.geometry import Point
from compas.geometry import Vector
from compas_fab.robots import DeviationVectorsGenerator
from compas_fab.robots import OrthonormalVectorsFromAxisGenerator
def frame_generator():
for i in range(6):
pt = Point(0, 0, 0) + Vector(0, i, 0)
zaxis = Vector(0, 0, 1)
for axis in DeviationVectorsGenerator(zaxis, math.radians(40), 1):
for xaxis in OrthonormalVectorsFromAxisGenerator(axis, math.radians(60)):
yaxis = axis.cross(xaxis)
yield Frame(pt, xaxis, yaxis)