from compas.geometry import Point, Vector, Frame, Polyline
from compas.geometry import Box
from compas.geometry import Translation
from compas.datastructures import Mesh
from compas_view2.app import App
from compas_gmsh.models import ShapeModel
# ==============================================================================
# Geometry
# ==============================================================================
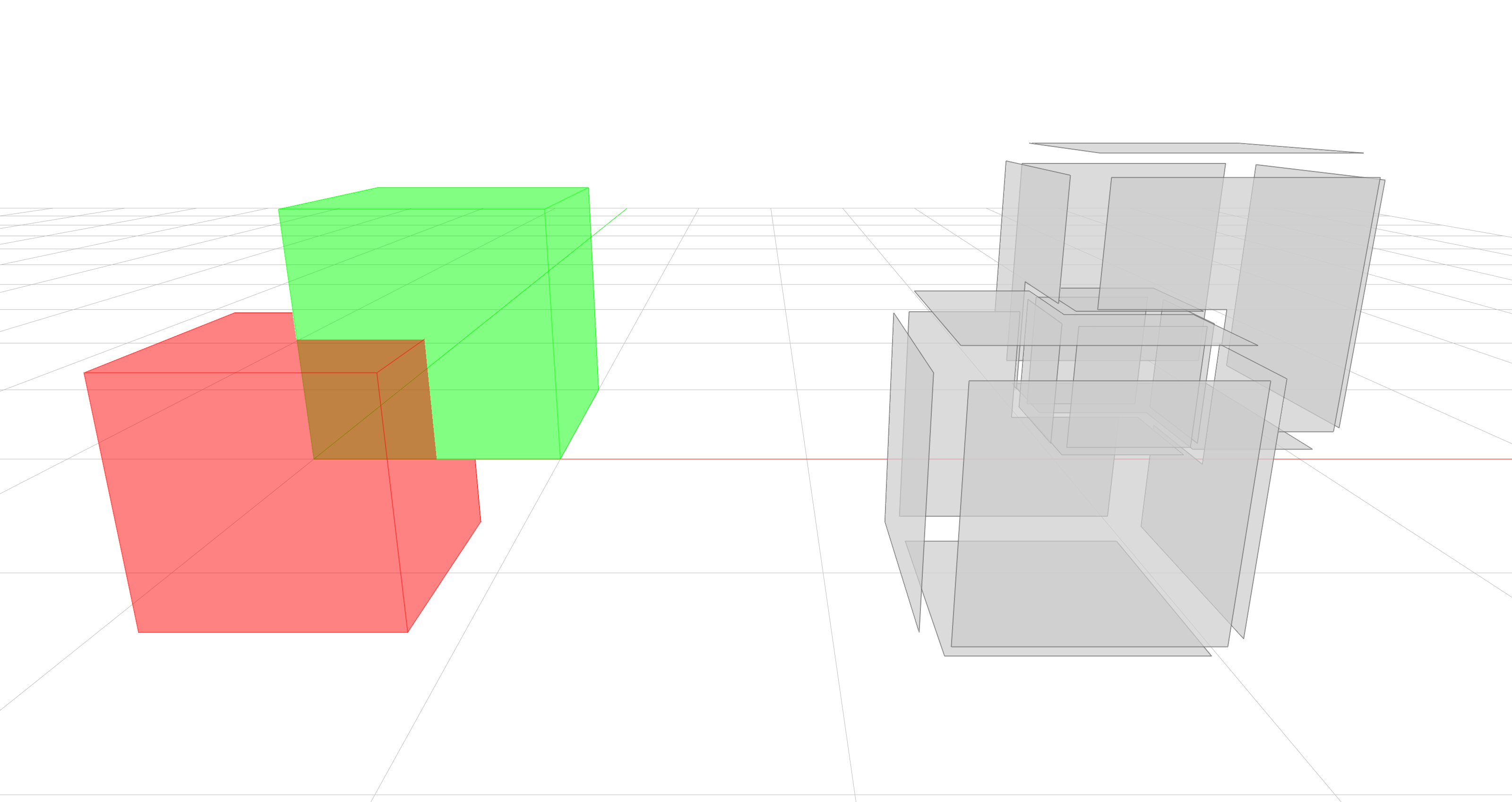
b1 = Box(1)
b2 = Box(1, 1, 1, frame=Frame(b1.vertices[6], Vector.Xaxis(), Vector.Yaxis()))
# ==============================================================================
# CSG Model
# ==============================================================================
model = ShapeModel(name="booleans")
model.options.mesh.lmin = 0.2
model.options.mesh.lmax = 0.2
model.boolean_fragment([model.add_box(b1)], [model.add_box(b2)])
model.generate_mesh(2)
model.optimize_mesh()
# ==============================================================================
# Fragments
# ==============================================================================
# this needs to be integrated in the lib
# PRs very welcome! :)
nodes = model.mesh.get_nodes()
node_tags = nodes[0]
node_coords = nodes[1].reshape((-1, 3), order="C")
vertices = {}
for tag, coords in zip(node_tags, node_coords):
vertices[int(tag)] = coords
fragments = []
for dimtag in model.model.get_entities(2):
faces = []
elements = model.mesh.get_elements(*dimtag)
for etype, etags, ntags in zip(*elements):
for i, etag in enumerate(etags):
n = model.mesh.get_element_properties(etype)[3]
faces.append(ntags[i * n : i * n + n])
mesh = Mesh.from_vertices_and_faces(vertices, faces)
mesh.remove_unused_vertices()
fragments.append(mesh)
# ==============================================================================
# Visualization with viewer
# ==============================================================================
viewer = App(width=1600, height=900)
viewer.view.camera.rz = 0
viewer.view.camera.rx = -75
viewer.view.camera.tx = 0
viewer.view.camera.ty = 0
viewer.view.camera.distance = 10
viewer.add(b1, opacity=0.7, facecolor=(1, 0, 0), linewidth=2)
viewer.add(b2, opacity=0.7, facecolor=(0, 1, 0), linewidth=2)
T2 = Translation.from_vector([3, 0, 0])
point = Point(0, 0, 0)
for mesh in fragments:
centroid = Point(*mesh.centroid())
vector = centroid - point
T1 = Translation.from_vector(vector * 0.2)
mesh.transform(T2 * T1)
viewer.add(mesh, show_lines=False)
viewer.add(
Polyline(
mesh.vertices_attributes("xyz", keys=list(mesh.vertices_on_boundary()))
),
linewidth=2,
)
viewer.run()