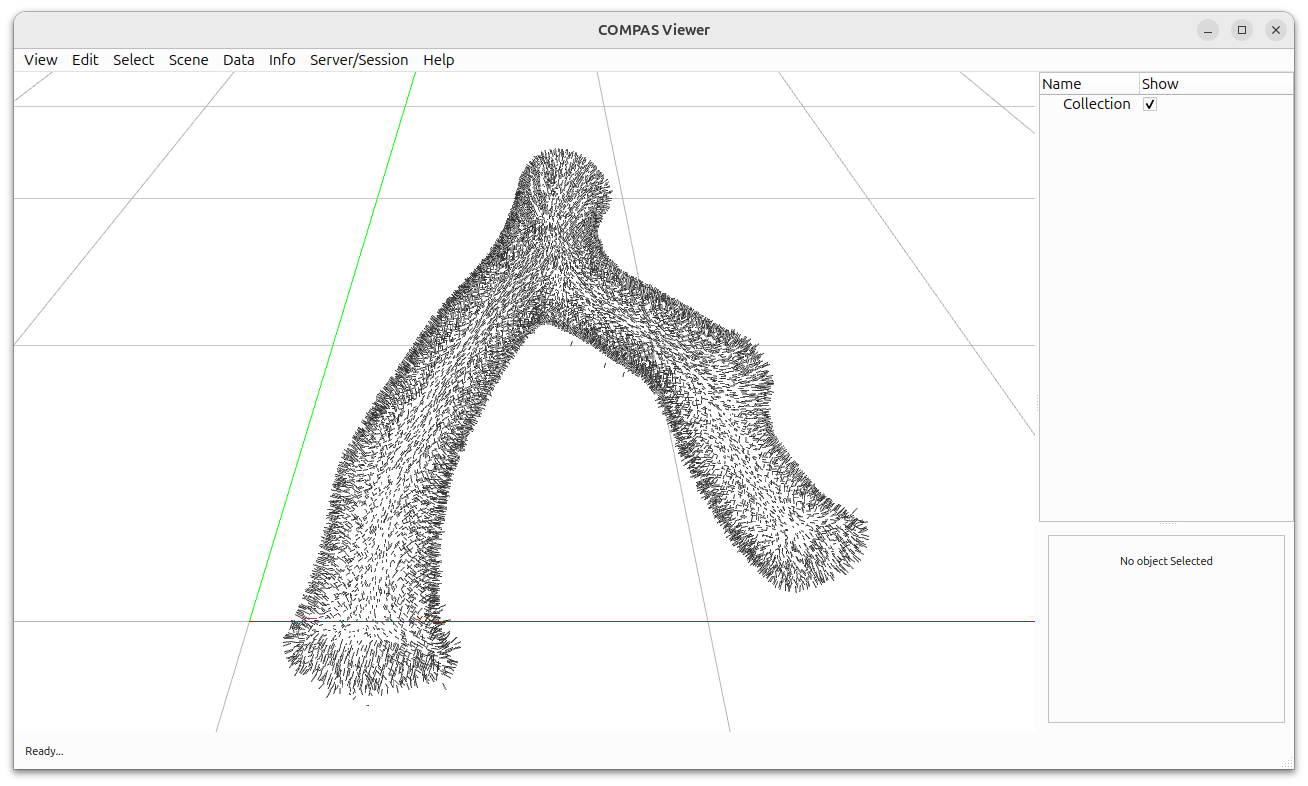
Point Cloud Normal Estimation
This example demonstrates how to estimate normals from a point cloud using COMPAS CGAL.
Key Features:
Loading point clouds from PLY files
Point cloud density reduction
Normal estimation using k-nearest neighbors
Visualization of point normals as scaled lines
from pathlib import Path
from compas.geometry import Line
from compas.geometry import Pointcloud
from compas_viewer import Viewer
from compas_viewer.config import Config
from compas_viewer.scene import Collection
from compas_cgal.reconstruction import pointset_normal_estimation
from compas_cgal.reconstruction import pointset_reduction
def reconstruction_pointset_normal_estimation():
# ==============================================================================
# Input geometry
# ==============================================================================
FILE = Path(__file__).parent.parent.parent / "data" / "forked_branch_1.ply"
cloud = Pointcloud.from_ply(FILE)
reduced_cloud = Pointcloud(pointset_reduction(cloud, 10))
points, vectors = pointset_normal_estimation(reduced_cloud, 16, True)
# ==============================================================================
# Compute
# ==============================================================================
lines = []
line_scale = 10
for p, v in zip(points, vectors):
line = Line(
[p[0], p[1], p[2]],
[
p[0] + v[0] * line_scale,
p[1] + v[1] * line_scale,
p[2] + v[2] * line_scale,
],
)
lines.append(line)
return lines
lines = reconstruction_pointset_normal_estimation()
# ==============================================================================
# Visualize
# ==============================================================================
config = Config()
config.camera.target = [600, 500, 200]
config.camera.position = [600, -1000, 1500]
config.camera.scale = 100
config.renderer.gridsize = (20000, 20, 20000, 20)
viewer = Viewer(config=config)
viewer.scene.add(Collection(lines))
viewer.show()