from compas.datastructures import Mesh
from compas.geometry import Box
from compas.geometry import Point
from compas.geometry import Polyline
from compas.geometry import Sphere
from compas_cgal.intersections import intersection_mesh_mesh
from compas_viewer import Viewer
# ==============================================================================
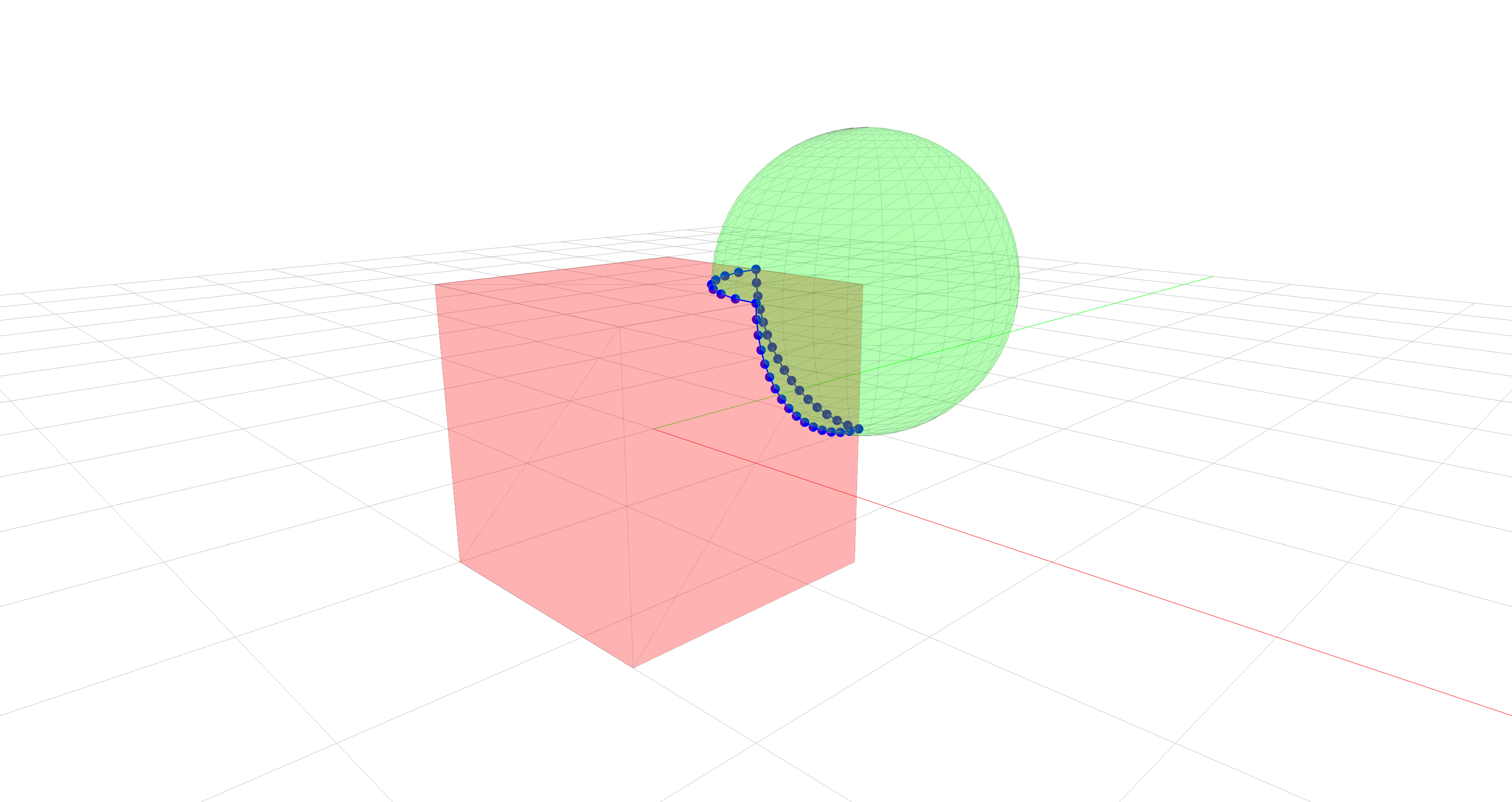
# Make a box and a sphere
# ==============================================================================
box = Box(2)
A = box.to_vertices_and_faces(triangulated=True)
sphere = Sphere(1, point=[1, 1, 1])
B = sphere.to_vertices_and_faces(u=32, v=32, triangulated=True)
# ==============================================================================
# Compute the intersections
# ==============================================================================
pointsets = intersection_mesh_mesh(A, B)
# ==============================================================================
# Process output
# ==============================================================================
polylines = []
for points in pointsets:
points = [Point(*point) for point in points]
polyline = Polyline(points)
polylines.append(polyline)
# ==============================================================================
# Visualize
# ==============================================================================
viewer = Viewer()
viewer.renderer.camera.target = [0, 0, 0]
viewer.renderer.camera.position = [4, -6, 3]
viewer.scene.add(Mesh.from_vertices_and_faces(*A), facecolor=(1.0, 0.0, 0.0), show_points=False)
viewer.scene.add(Mesh.from_vertices_and_faces(*B), facecolor=(0.0, 1.0, 0.0), show_points=False, opacity=0.3)
for polyline in polylines:
viewer.scene.add(
polyline,
linecolor=(0.0, 0.0, 1.0),
lineswidth=3,
pointcolor=(0.0, 0.0, 1.0),
pointsize=20,
show_points=True,
)
viewer.show()