from compas.datastructures import Mesh
from compas.geometry import Polygon
from compas.geometry import Translation
from compas_cgal.triangulation import conforming_delaunay_triangulation
from compas_cgal.triangulation import refined_delaunay_mesh
from compas_viewer import Viewer
# ==============================================================================
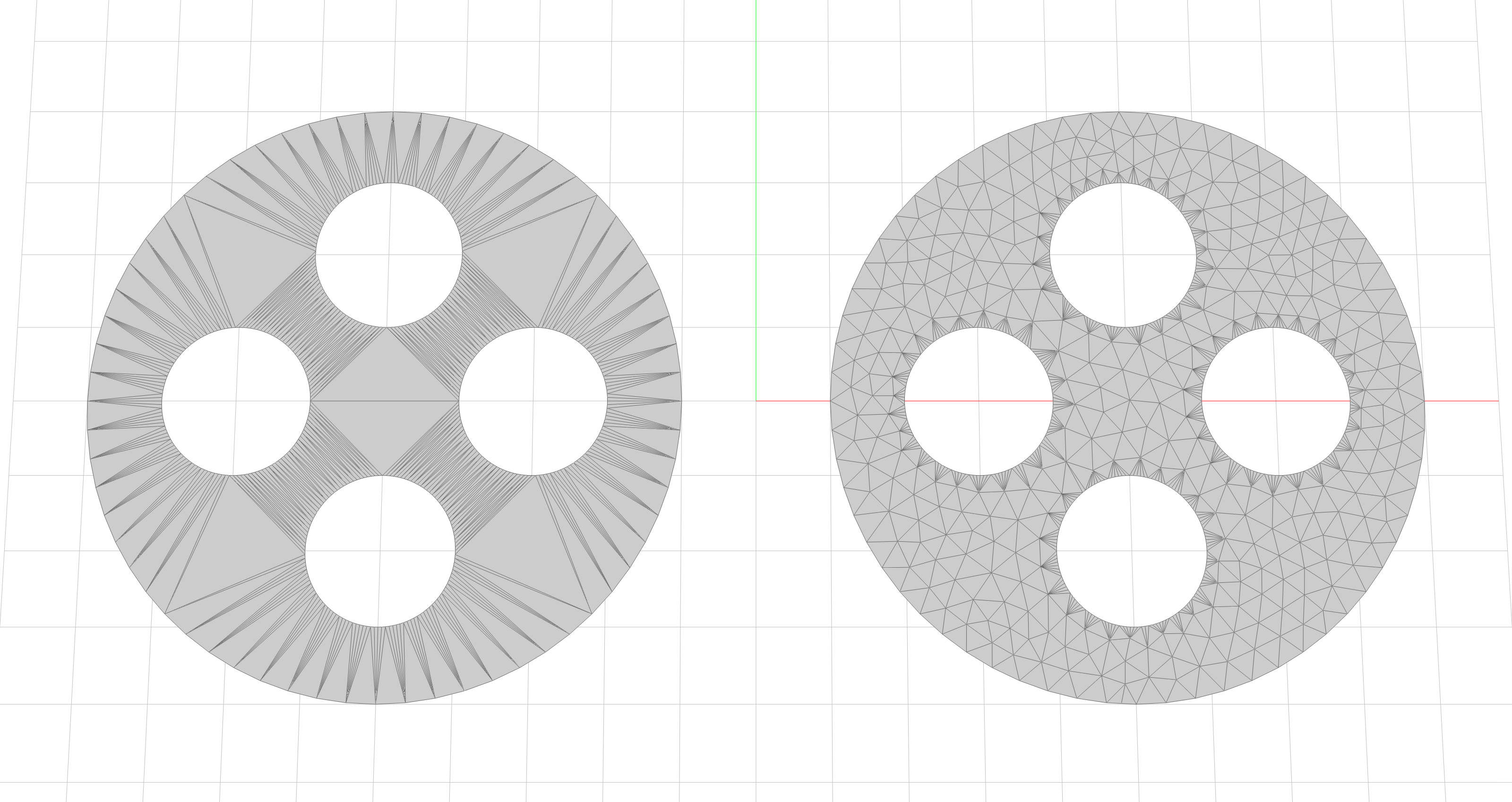
# Constraints
# ==============================================================================
boundary = Polygon.from_sides_and_radius_xy(64, 4)
hole = Polygon.from_sides_and_radius_xy(128, 1)
hole1 = hole.transformed(Translation.from_vector([2, 0, 0]))
hole2 = hole.transformed(Translation.from_vector([-2, 0, 0]))
hole3 = hole.transformed(Translation.from_vector([0, 2, 0]))
hole4 = hole.transformed(Translation.from_vector([0, -2, 0]))
holes = [hole1, hole2, hole3, hole4]
# ==============================================================================
# Triangulation
# ==============================================================================
V, F = conforming_delaunay_triangulation(
boundary,
holes=holes,
)
cdt = Mesh.from_vertices_and_faces(V, F)
V, F = refined_delaunay_mesh(
boundary,
holes=holes,
maxlength=0.5,
is_optimized=True,
)
rdm = Mesh.from_vertices_and_faces(V, F)
# ==============================================================================
# Viz
# ==============================================================================
viewer = Viewer(width=1600, height=900)
viewer.renderer.camera.target = [0, 0, 0]
viewer.renderer.camera.position = [0, -1, 13]
viewer.scene.add(cdt.transformed(Translation.from_vector([-5, 0, 0])))
viewer.scene.add(rdm.transformed(Translation.from_vector([+5, 0, 0])))
viewer.show()