from pathlib import Path
from compas.colors import Color
from compas.geometry import Line
from compas.geometry import Point
from compas.geometry import Pointcloud
from compas.geometry import Polygon
from compas_cgal.polygonal_surface_reconstruction import polygonal_surface_reconstruction_ransac
from compas_cgal.reconstruction import pointset_normal_estimation
from compas_viewer import Viewer
# Define the file path for the point cloud data
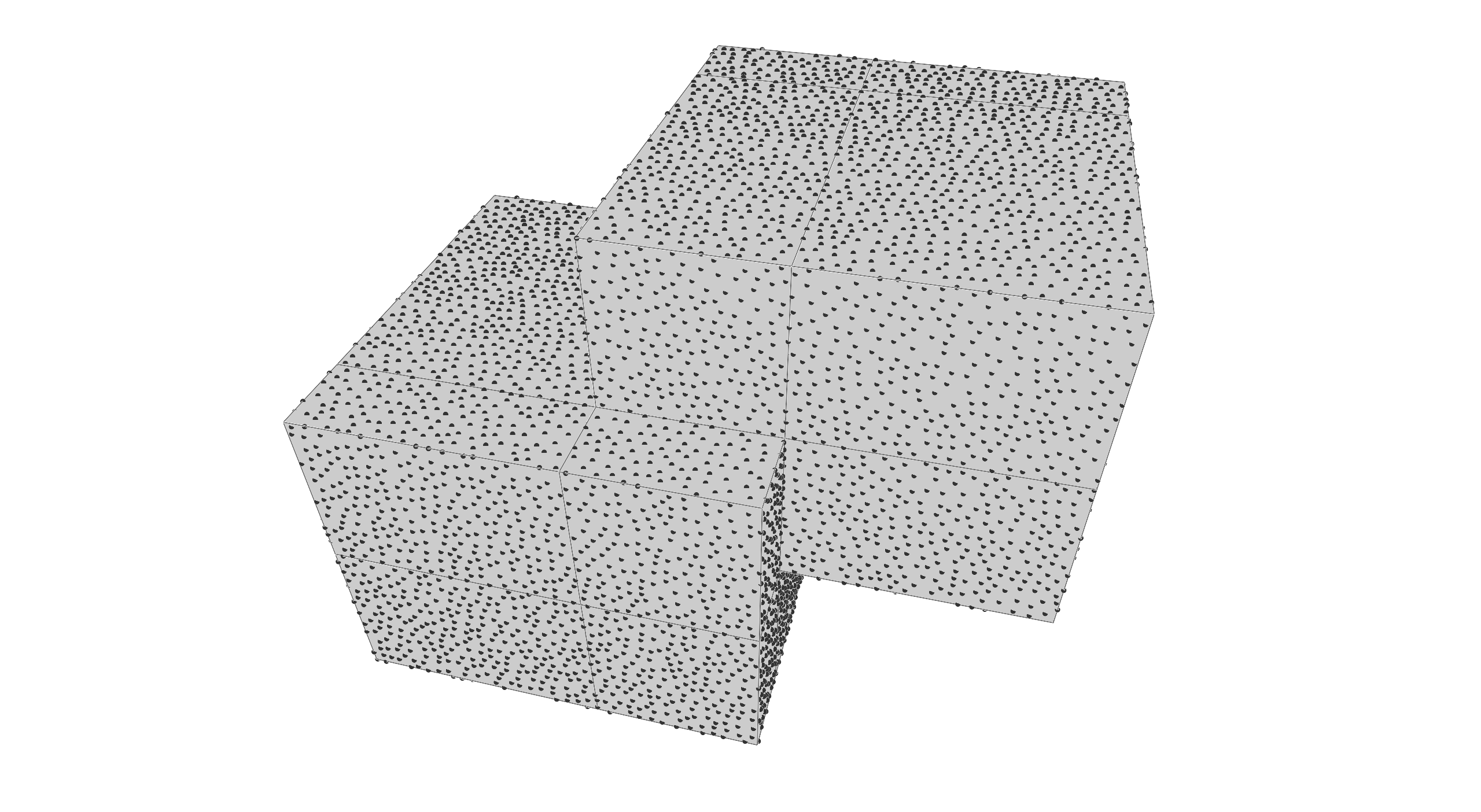
FILE = Path(__file__).parent.parent.parent / "data" / "two_intersecting_boxes.ply"
# Load the point cloud data from the PLY file
cloud = Pointcloud.from_ply(FILE)
# Estimate normals for the point cloud
points, vectors = pointset_normal_estimation(cloud, 4, True)
vertices, faces = polygonal_surface_reconstruction_ransac(points, vectors)
# Create polygons from vertices and faces
polygons = []
for face in faces:
polygon = []
for i in face:
polygon.append(Point(*vertices[i]))
polygons.append(Polygon(polygon))
# Create lines and properties for visualizing normals
lines = []
line_properties = []
line_scale = 25
# Iterate over points and vectors to create lines and color properties
for p, v in zip(points, vectors):
# Create lines
lines.append(
Line(
Point(p[0], p[1], p[2]),
Point(
p[0] + v[0] * line_scale,
p[1] + v[1] * line_scale,
p[2] + v[2] * line_scale,
),
)
)
# Normalize vector components to be in the range [0, 1] for color representation
r = (v[0] + 1) * 0.5
g = (v[1] + 1) * 0.5
b = (v[2] + 1) * 0.5
# Store line color properties
line_properties.append({"linecolor": Color(r, g, b)})
# =============================================================================
# Viz
# =============================================================================
viewer = Viewer()
# viewer.renderer.camera.position = [5, -4, 2]
# viewer.renderer.camera.target = [0, 1, 0])
# viewer.scene.add(Pointcloud(points))
# line_collection = Collection(lines, line_properties)
# viewer.scene.add(line_collection)
for polygon in polygons:
viewer.scene.add(polygon, linewidth=2)
viewer.show()