import math
from pathlib import Path
from compas.datastructures import Mesh
from compas.geometry import Pointcloud
from compas.geometry import Rotation
from compas.geometry import Scale
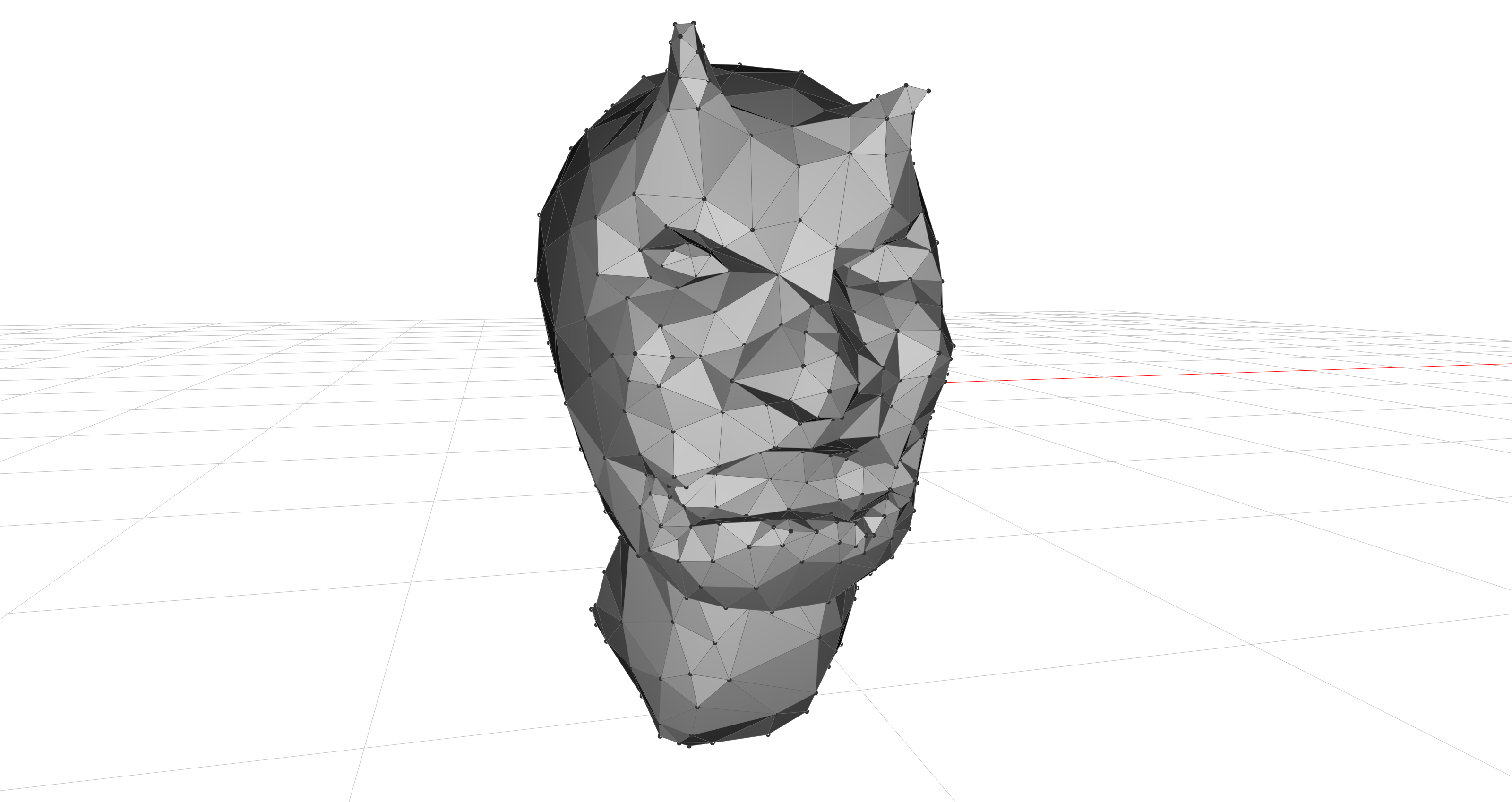
from compas_cgal.reconstruction import poisson_surface_reconstruction
from compas_viewer import Viewer
FILE = Path(__file__).parent.parent.parent / "data" / "oni.xyz"
points = []
normals = []
with open(FILE, "r") as f:
for line in f:
x, y, z, nx, ny, nz = line.strip().split()
points.append([float(x), float(y), float(z)])
normals.append([float(nx), float(ny), float(nz)])
V, F = poisson_surface_reconstruction(points, normals)
mesh = Mesh.from_vertices_and_faces(V, F)
R = Rotation.from_axis_and_angle([1, 0, 0], math.radians(90))
S = Scale.from_factors([5, 5, 5])
T = R * S
cloud = Pointcloud(V)
cloud.transform(T)
mesh.transform(T)
# =============================================================================
# Viz
# =============================================================================
viewer = Viewer(width=1600, height=900)
# viewer.renderer.camera.position = [-5, -5, 1.5]
# viewer.renderer.camera.target = [0, 0, 1.5])
viewer.scene.add(mesh, show_points=False)
# viewer.scene.add(cloud)
viewer.show()