import os
from compas.geometry import Box
from compas.geometry import Scale
import compas_view2
from compas_view2.app import App
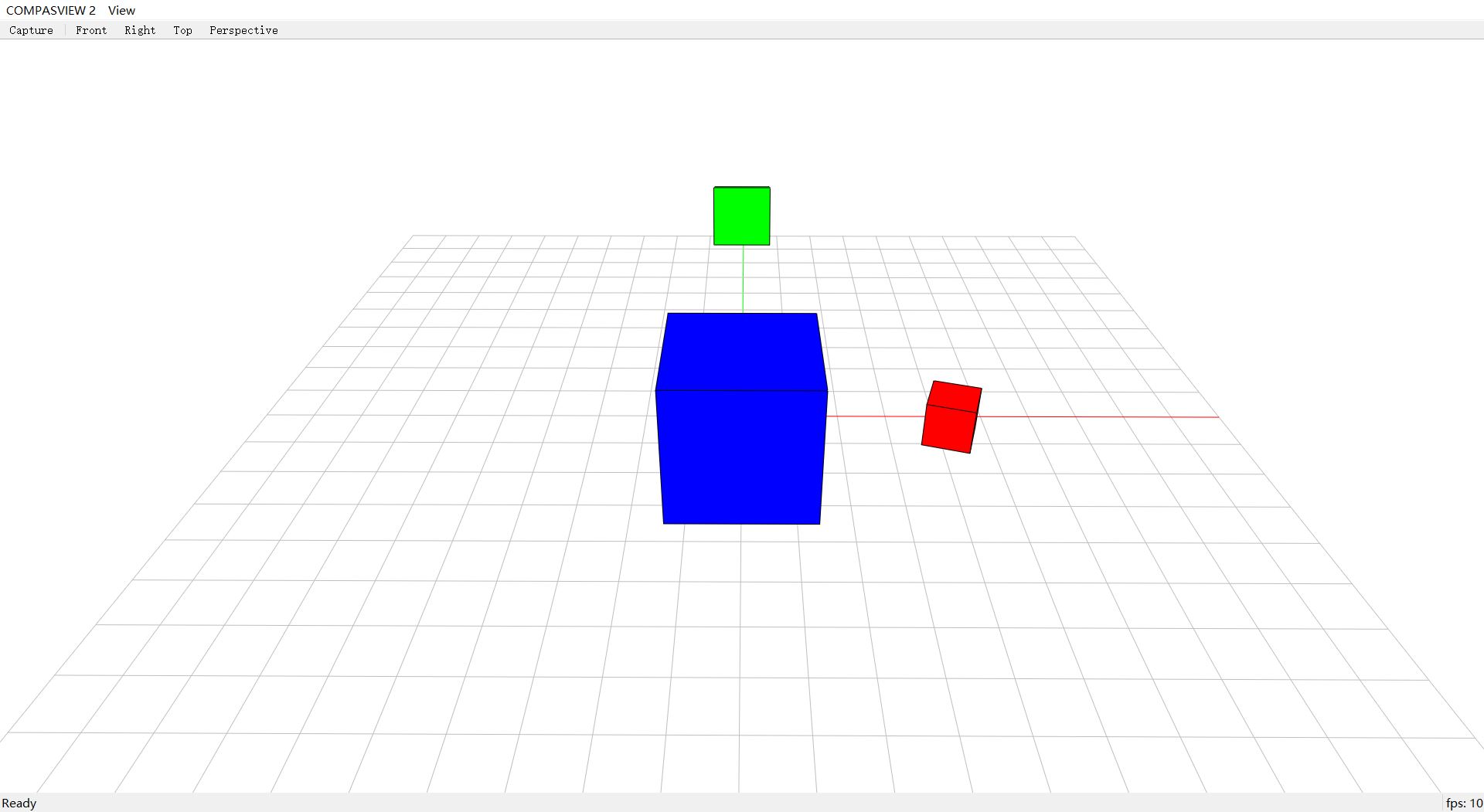
viewer = App()
box1 = Box(([0, 0, 0], [1, 0, 0], [0, 1, 0]), 1, 1, 1)
box2 = Box(([0, 0, 0], [1, 0, 0], [0, 1, 0]), 1, 1, 1)
box3 = Box(([0, 0, 0], [1, 0, 0], [0, 1, 0]), 1, 1, 1)
obj1 = viewer.add(box1, facecolor=(1, 0, 0), linecolor=(0, 0, 0))
obj2 = viewer.add(box2, facecolor=(0, 1, 0), linecolor=(0, 0, 0))
obj3 = viewer.add(box3, facecolor=(0, 0, 1), linecolor=(0, 0, 0))
s = 1
FILE = os.path.join(compas_view2.TEMP, 'record2.gif')
# Record 100 frames and save as "record.gif"
@viewer.on(interval=50, record=True, frames=100, record_path=FILE)
def transform(frame):
obj1.translation[0] += 0.1
obj1.rotation[2] += 0.1
obj1.update()
obj2.translation[2] += 0.1
obj2.rotation[0] += 0.1
obj2.update()
global s
s += 0.05
S = Scale.from_factors([s, s, s])
obj3.matrix = S.matrix
obj3.update()
viewer.run()