import random
import math
import compas
from compas.datastructures import Network
from compas.datastructures import Mesh
from compas.geometry import Pointcloud, Box
from compas.geometry import Scale, Rotation, Translation
from compas.colors import ColorMap
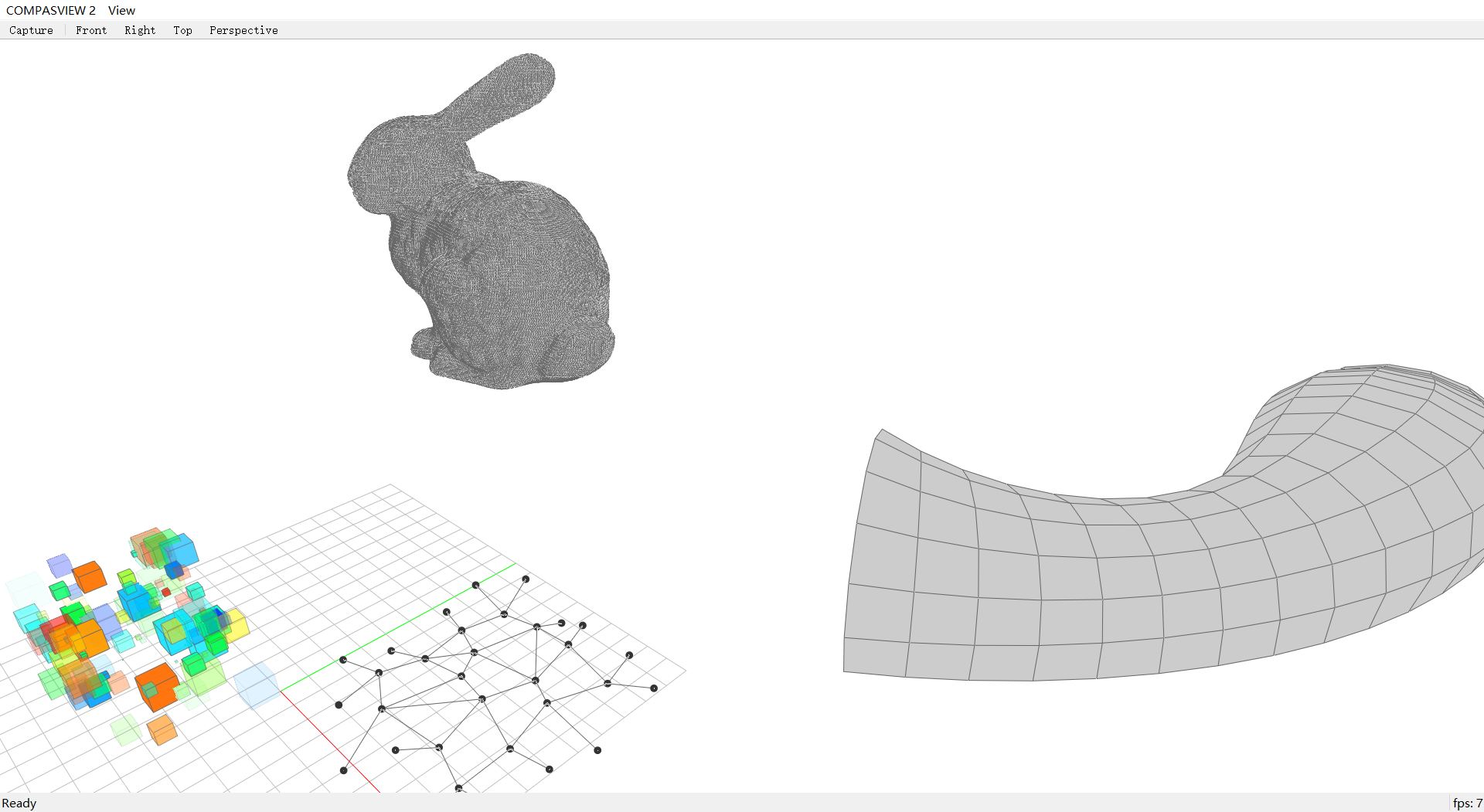
from compas_view2.app import App
viewer = App()
cmap = ColorMap.from_rgb()
mesh = Mesh.from_off(compas.get('tubemesh.off'))
viewer.add(mesh)
network = Network.from_obj(compas.get('grid_irregular.obj'))
viewer.add(network)
bunny = Mesh.from_ply(compas.get('bunny.ply'))
T = Translation.from_vector([-10, 20, 0])
R = Rotation.from_axis_and_angle([1, 0, 0], math.radians(90))
S = Scale.from_factors([100, 100, 100])
bunny.transform(T * R * S)
viewer.add(bunny)
cloud = Pointcloud.from_bounds(10, 5, 3, 100)
R1 = Rotation.from_axis_and_angle([0, 0, 1], math.radians(180))
for point in cloud.transformed(R1):
size = random.random()
box = Box((point, [1, 0, 0], [0, 1, 0]), size, size, size)
viewer.add(box, facecolor=cmap(random.random()), opacity=random.random())
viewer.view.camera.zoom_extents()
viewer.show()