robots
Model
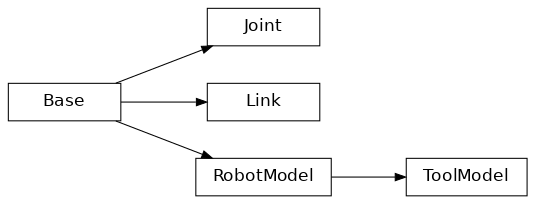
The root of the model is the RobotModel class, which
describes a robot consisting of a set of link elements, and a set of joint
elements connecting the links together.
RobotModel is the root element of the model. |
|
Representation of the kinematics and dynamics of a joint and its safety limits. |
|
Link represented as a rigid body with an inertia, visual, and collision features. |
|
Represents a tool to be attached to the robot’s flange. |
Geometric description
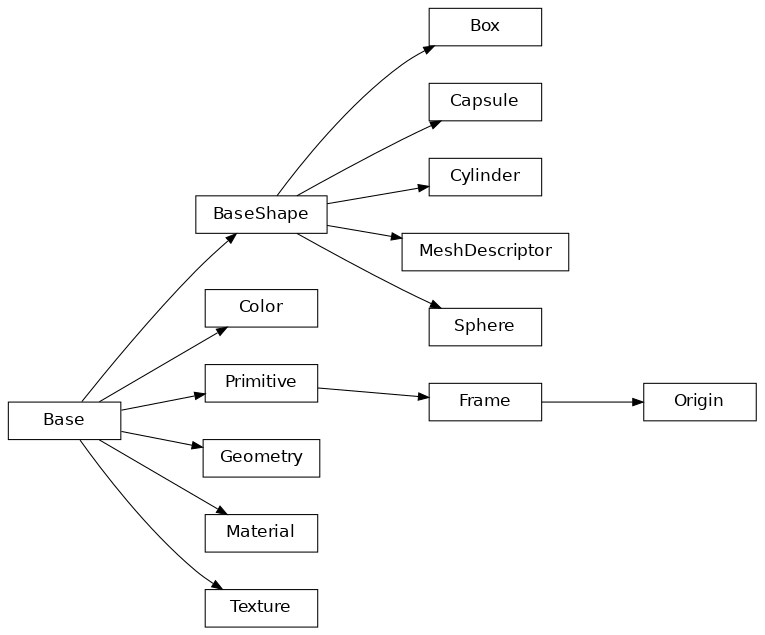
The robot itself as well as its links can be geometrically described using the following classes.
Reference frame represented by an instance of |
|
Geometrical description of the shape of a link. |
|
3D shape primitive representing a box. |
|
3D shape primitive representing a cylinder. |
|
3D shape primitive representing a sphere. |
|
3D shape primitive representing a capsule. |
|
Description of a mesh. |
|
Material description. |
|
Texture description. |
|
Color represented in RGBA. |
Link
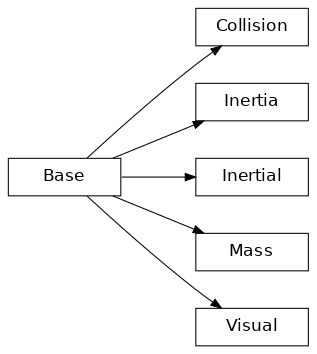
The link is described as a rigid body with inertial, visual and collision values.
Visual description of a link. |
|
Collidable description of a link. |
|
Inertial properties of a link. |
|
Represents a value of mass usually related to a link. |
|
Rotational inertia matrix (3x3) represented in the inertia frame. |
Joint
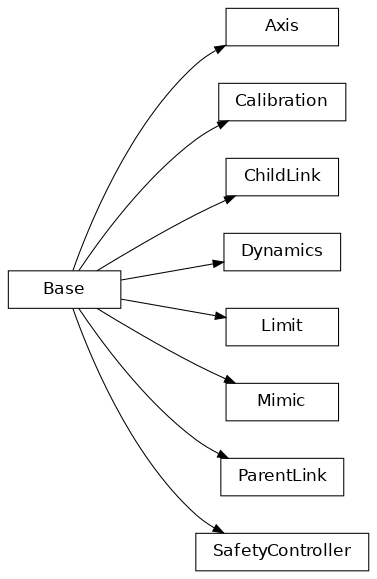
The joint describes the kinematics and dynamics of the robot’s joint.
Describes a parent relation between a joint its parent link. |
|
Describes a child relation between a joint and its child link. |
|
Reference positions of the joint, used to calibrate the absolute position. |
|
Physical properties of the joint used for simulation of dynamics. |
|
Joint limit properties. |
|
Representation of an axis or vector. |
|
Description of joint mimic. |
|
Safety controller properties. |
Resources
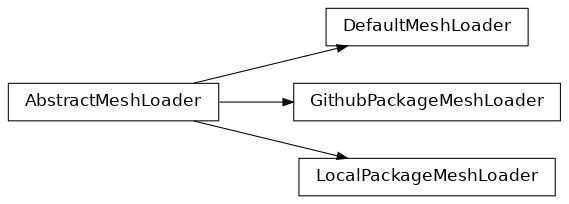
Model descriptions usually do not contain embedded geometry information but only descriptions, filenames or URLs for externally hosted resources. For that purpose, this package provides various loader classes that help automate the processing of these resources.
Basic contract/interface for all mesh loaders. |
|
Handles basic mesh loader tasks, mostly from local files. |
|
Loads resources stored in Github. |
|
Loads suport package resources stored locally. |